38
parameter P5-06 to delay the servo OFF, make sure the servo isn’t OFF until the brake
action in order to delete the machine moving.
Note: this parameter is the time when motor stop and TGON is invalid.
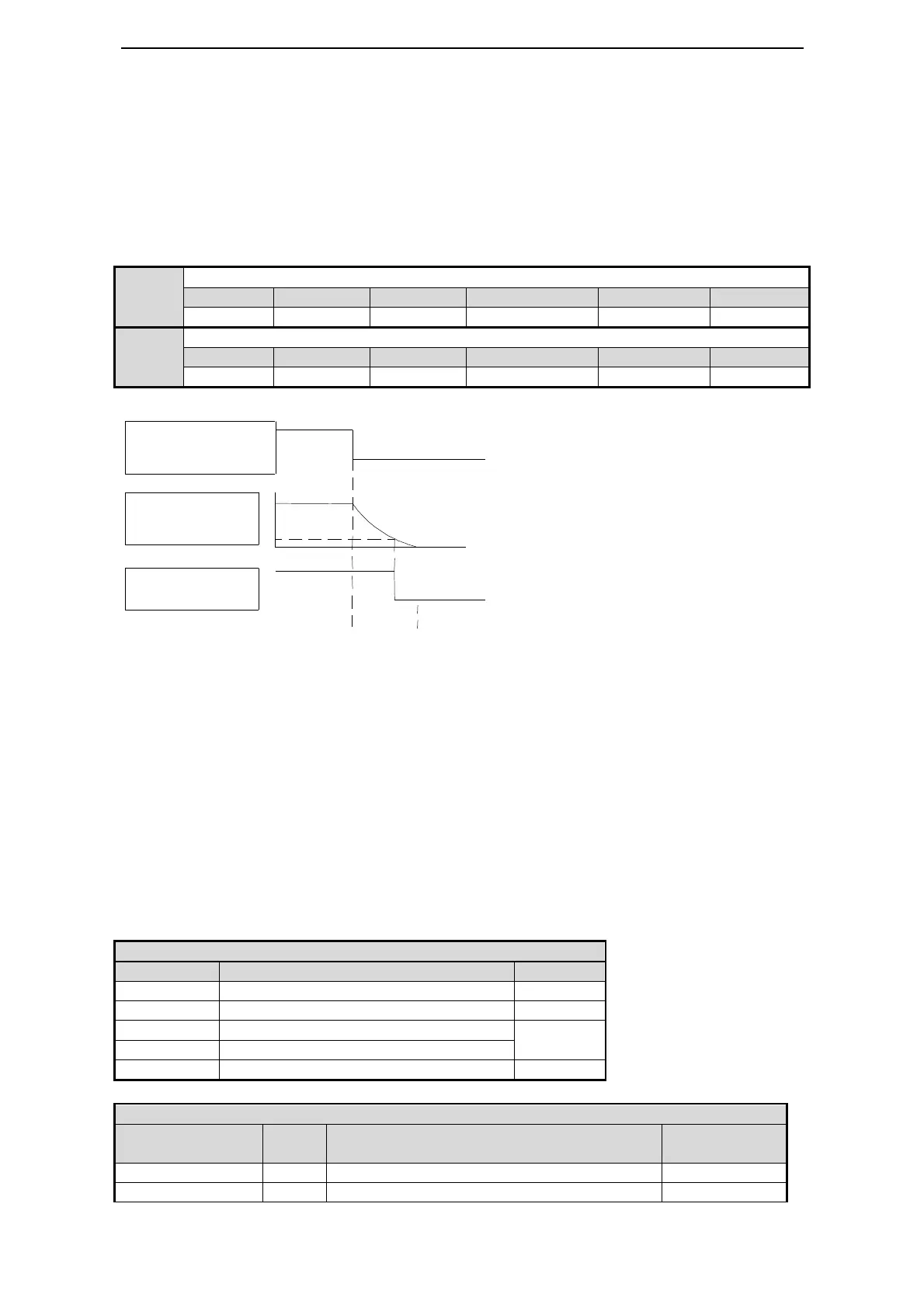
(4) Brake ON parameter (When servo motor is rotating)
The brake action setting during the motor is rotating: parameter P5-07, P5-08.
Notes: the motor will power OFF when alarm occurs. The machine will move as gravity
until the brake action.
Set below parameters in order to use brake when motor speed decreases to setting value or
waiting time ends.
Set the brake time when servo OFF caused by /S-ON signal or alarm.
The brake is used to protect the position. The brake must be effective at suitable time
when servo motor stop. Users can adjust the parameters according to the machine action.
The /BK signal from ON to OFF under either of the following conditions:
1. Motor speed drops below the value of P5-07 after servo OFF.
2. over the time of P5-08 after servo OFF.
The real speed is max speed (P3-09) even set the speed higher than max in P5-07.
5-3.Position mode (external pulse command)
Below parameters are used in position mode with pulse.
Electronic gear ratio (numerator)
Electronic gear ratio (denominator)
Other available parameters
eter
Position command filter selection
Brake command output speed
Brake command waiting time
/S-ON input or alarm
(rpm)
P5-07

 Loading...
Loading...


