51
5-5-3. Speed command offset auto-adjustment (F1-03)
When the servo is in analog voltage speed mode, even if the command voltage is 0V,
motor will run at very low speed. The micro-motion will happen when the command
voltage micro-offset (mV) of host controller or external circuit occurs. Auto-adjust the
command offset by operate panel of servo. Refer to chapter 4-4-2.
5-5-4. Proportion action command (/P-CON)
mode
on
mode
is the speed control mode signal selected from PI (proportion integral) and P (proportion).
2. If set to P control mode, the motor rotate and micro-vibration caused by speed command input drift
can be decreased. But the servo stiffness will decrease.
3. /P-CON signal can be distributed to input terminal via parameter P5-11. Refer to chapter 5-12-1.
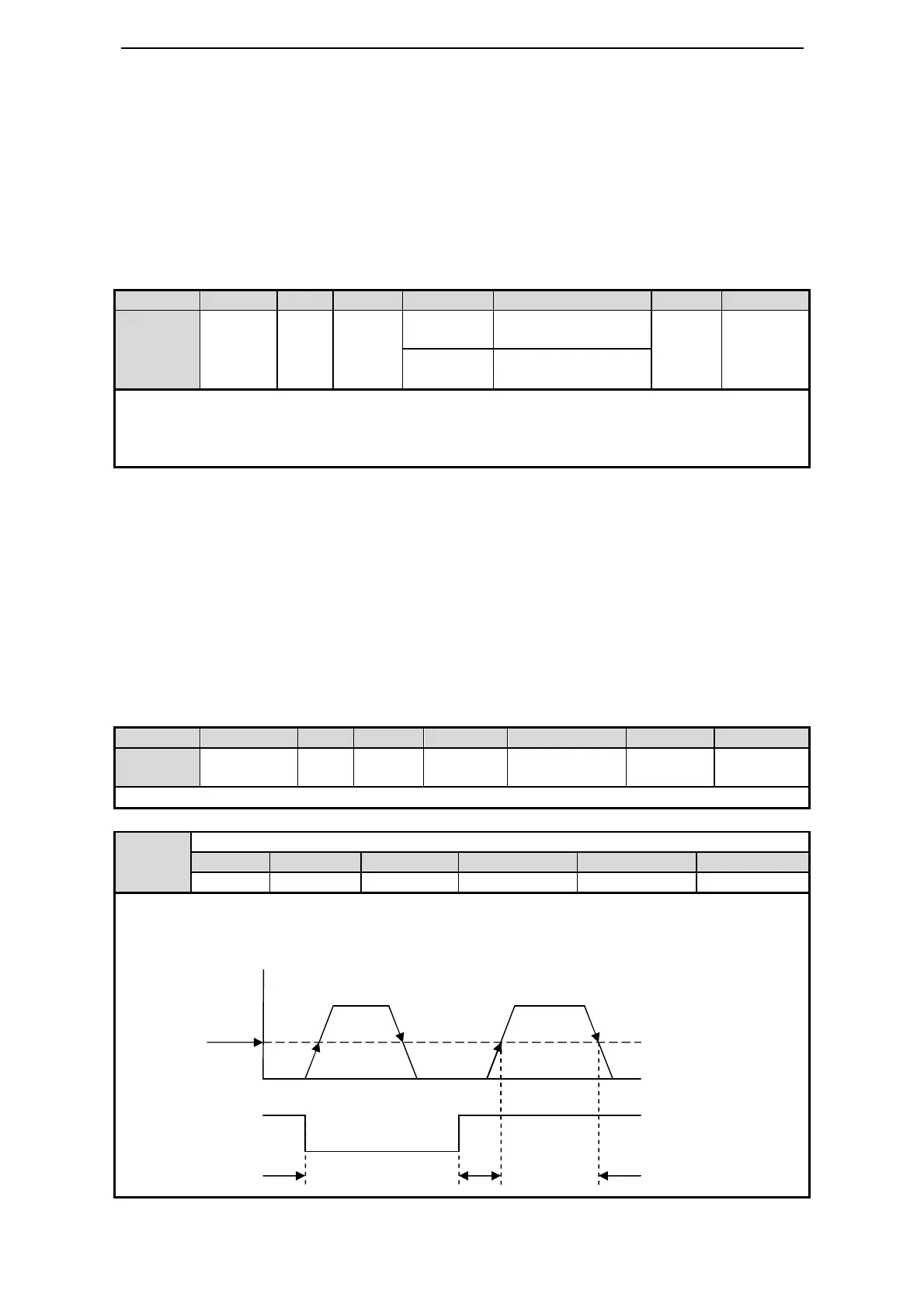
5-5-5. Zero clamp (/ZCLAMP)
(1) Function
This function is used when host controller uses speed command input and the servo
system isn’t configured the position loop. In other words, the function will be used when
the motor must stop and enter lock state even the V-REF input voltage is not zero. After
the zero clamp function is ON, servo will configure the temporary position loop inside,
motor will clamp in ±1 pulse. Motor will return to zero clamp position even the motor is
rotating with external force.
(2) Input signal setting
(3) Parameter setting
distribute
on
signal is distributed to input terminal by parameter P5
when meets the following conditions:
Speed control (submode 3 or 4)
Set ON /ZCLAMP
Speed command value is less than the value of P5-01
voltage
V-REF speed command
ON ON OFF

 Loading...
Loading...


