42
Select 1-time delay feature or moving average filter.
Set the filter time:
5-3-5. Pulse error clear (/CLR)
Pulse error: the difference between command pulse of controller (such as PLC) and
feedback pulse of servo in position mode. Its unit is 1 reference unit; it is related to the
reference unit of electronic gear ratio.
mode
on
can be used as input terminal, please refer to chapt
2. Monitor the pulse error via U-08.
Function: after set on /CLR signal, the error counter is set to 0, position-loop given position is set to
current position. Clear the pulse error at the rising edge of /CLR signal.
1
/CLR signal 0
Clear once here
So after the /CLR signal is ON, the error will accumulate if the servo still receive pulses.
5-3-6. Positioning complete (/COIN)
Use the signal when the controller needs to confirm the completion of positioning.
mode
Output positioning complete
signal from SO1
on
Note: /COIN can be output from other terminals, please refer
Width of positioning complete
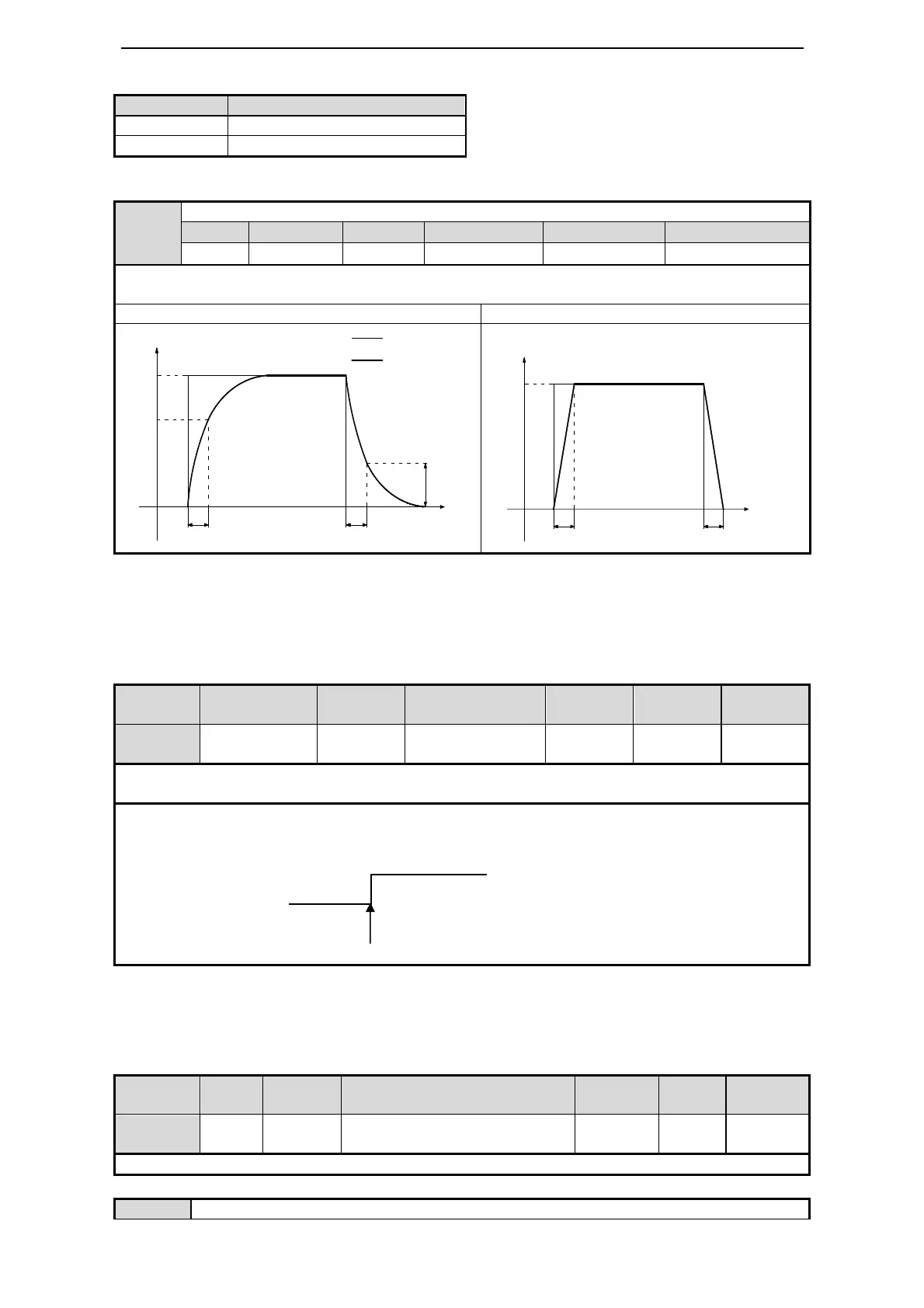
mmand filter time parameters
The comparison of P2-04 in First-order inertia filter and smooth filter mode:
100%
63.2%
t
36.8%
P2-04
P2-04
滤波后
滤波前
P2-04
P2-04
100%
t
Before filter
After filter

 Loading...
Loading...


