2.2 Servomotor Main Circuit Cables
2.2.2 Servomotor Main Circuit Cables for Servomotors with Holding Brakes
2-4
2.2.2
Servomotor Main Circuit Cables for Servomotors with
Holding Brakes
Selection Table
*1. Replace the boxes () in the order number with the cable length (03, 05, 10, 15, or 20).
*2. Use Flexible Cables for moving parts of machines, such as robots.
*3. The recommended bending radius (R) is 90 mm or larger.
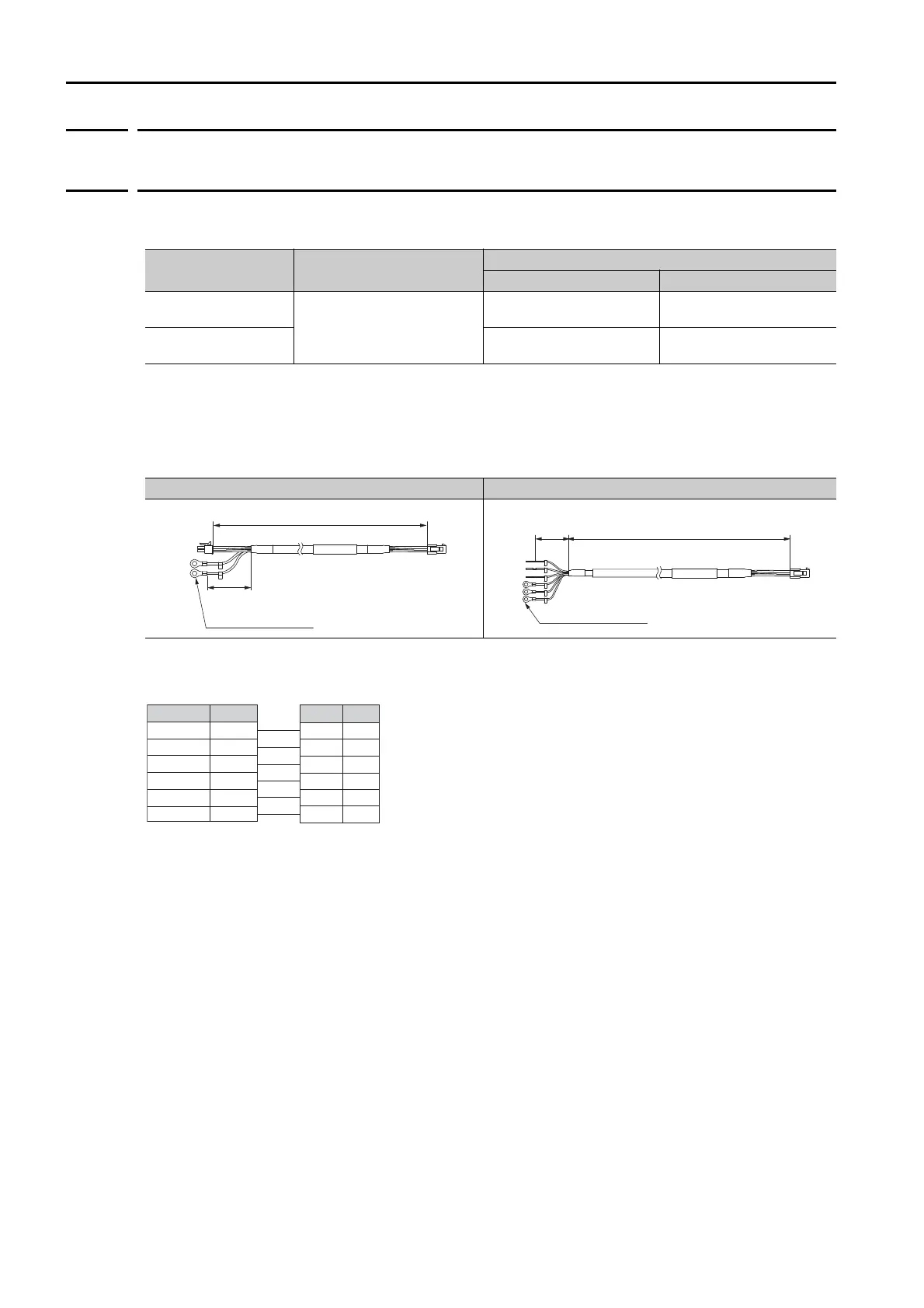
Lead Structure
Wiring Specifications
Note: There is no polarity for the connection to the holding brake.
Servomotor Model Length (L)
Order Number
*1
Standard Cable Flexible Cable
*2, *3
SGM7M-A1E to -A3E
11 W to 33 W
3 m, 5 m, 10 m,
15 m, and 20 m
JZSP-CF1M10--E JZSP-CF1M30-
-E
SGM7M-A1A to -A3A
11 W to 33 W
JZSP-CF2M03--E JZSP-CF2M23-
-E
For SGM7M-A1E to -A3E For SGM7M-A1A to -A3A
M4 crimped terminal
50 mm
L
SERVOPACK end Motor end
B
B
SERVOPACK end Motor end
50 mm
L
M4 crimped terminal
PinSignal
SignalWire Color
1
2
3
4
5
6
Servomotor Connector
FG
Phase W
Phase V
Phase U
Brake
Brake
Brake
Brake
FG
Phase W
Phase V
Phase U
Green/yellow
Blue
White
Red
Black
Black
SERVOPACK Leads
 Loading...
Loading...








