2 Installation and commissioning
2.2.5. Working range, IRB 4400/S
45 3HAC022032-001 Revision: E
© Copyright 2004-2008 ABB. All rights reserved.
2.2.5. Working range, IRB 4400/S
Extreme positions
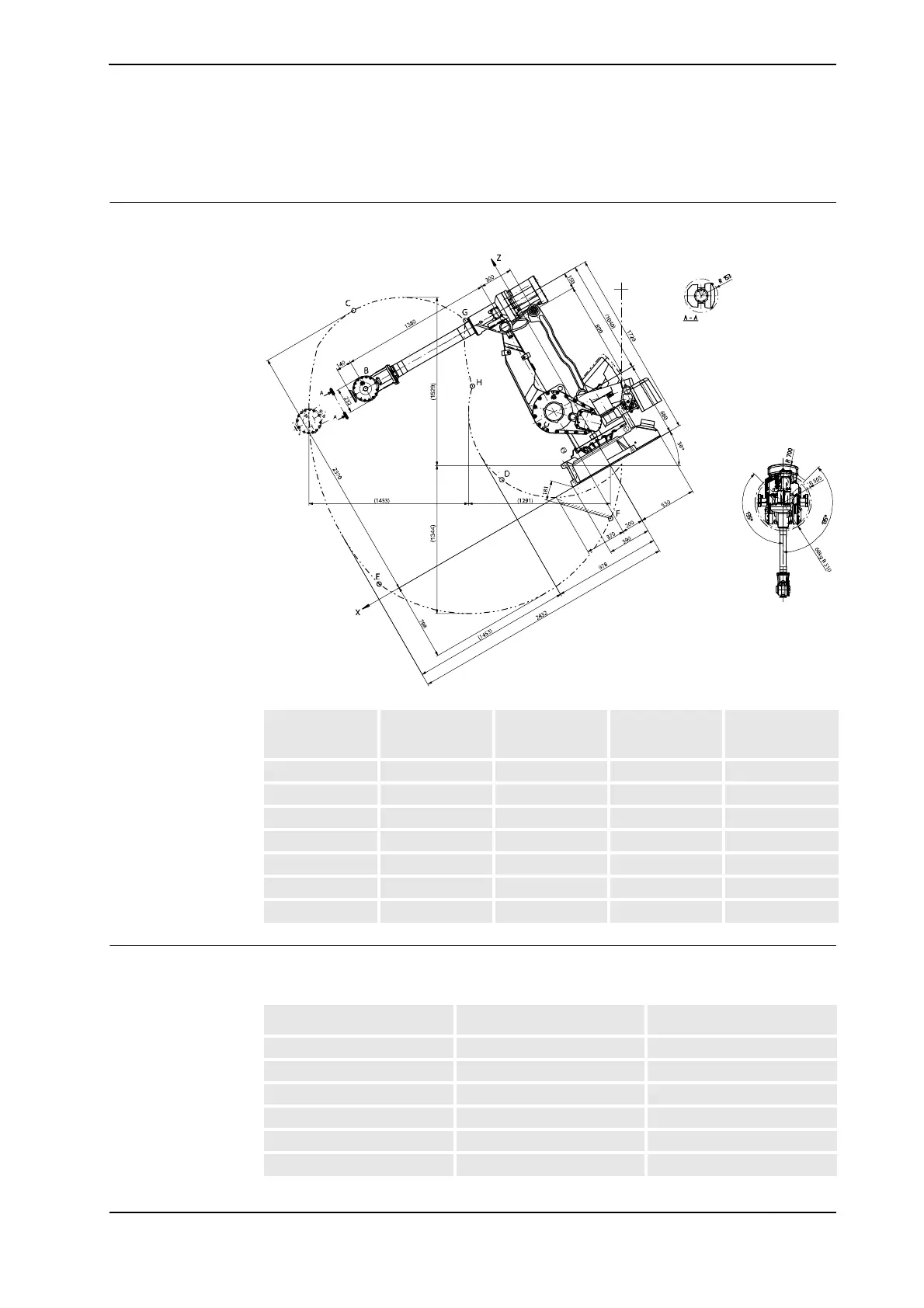
The illustration below shows the extreme positions of the robot arm IRB 4400/S:
xx0300000243
Robot motion
The table below specifies the types and ranges of the robot motion in every axis.
Positions in
illustration
Position X
(mm)
Position Z
(mm)
Angle Axis 2
(degrees)
Angle Axis 3
(degrees)
B 1580 1720 0 0
C 1320 2390 0 -30
D 919 383 0 65
E 2360 120 90 -60
F 239 -417 90 44
G 484 1804 -70 40
H 725 1254 -70 65
Location of motion Type of motion Range of movement
Axis 1 Rotation motion +135° to -135°
Axis 2 Arm motion +90° to -70°
Axis 3 Arm motion +65° to -60°
Axis 4 Wrist motion +200° to -200°
Axis 5 Bend motion +120° to -120°
Axis 6 Turn motion +400° to -400°

 Loading...
Loading...







