2 Installation and commissioning
2.2.7. Risk of tipping/stability - IRB 4450S
47 3HAC022032-001 Revision: E
© Copyright 2004-2008 ABB. All rights reserved.
2.2.7. Risk of tipping/stability - IRB 4450S
Risk of tipping
When the robot model IRB 4450S not is fastened to the foundation and standing still, the
robot is not stable in the whole working area. Moving the arms will displace the center of
gravity, which may cause the robot to tip over.
Do not change the robot position before securing it to the foundation!
Stability
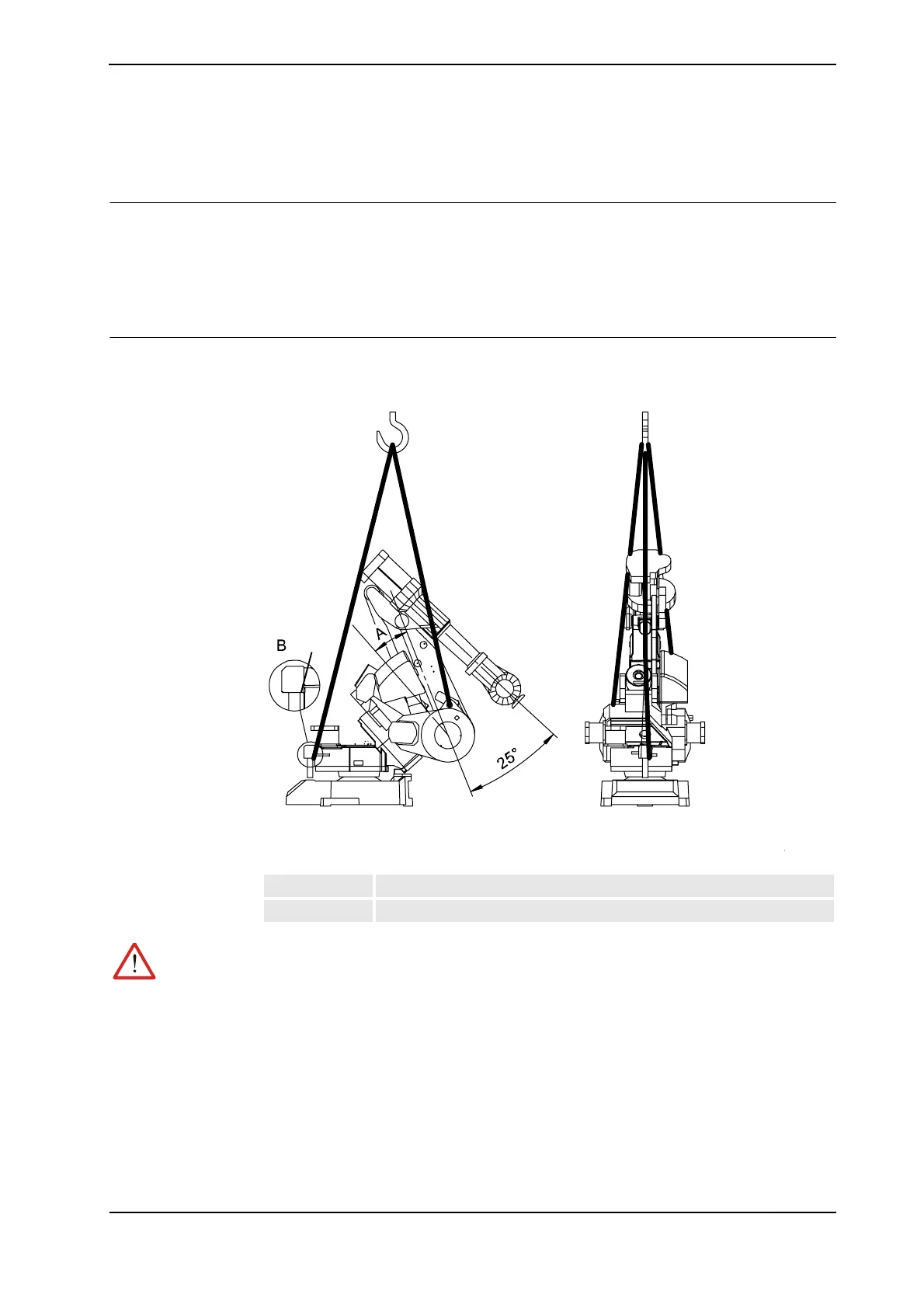
The figure below shows the robot in its shipping position, which also is the most stable
position.
xx0500002035
The robot is likely to be mechanically unstable while not secured to the foundation!
A Angle (degress specified for the different versions in the lifting instruction)
B Mechanical stop

 Loading...
Loading...







