2 Installation and commissioning
2.4.5. Unlimited working range
75 3HAC022032-001 Revision: E
© Copyright 2004-2008 ABB. All rights reserved.
2.4.5. Unlimited working range
Resetting the work area for an axis
The function "Resetting the work area for an axis", included in Advanced Motions 3.0, can
also be used for axis 4. To enable this function, the mechanical stop on axis 4 should be
removed. Follow the procedure below to dismantle the mechanical stop.
A more detailed view of the component and its position may be found in chapter Foldouts in
the Product manual, reference information.
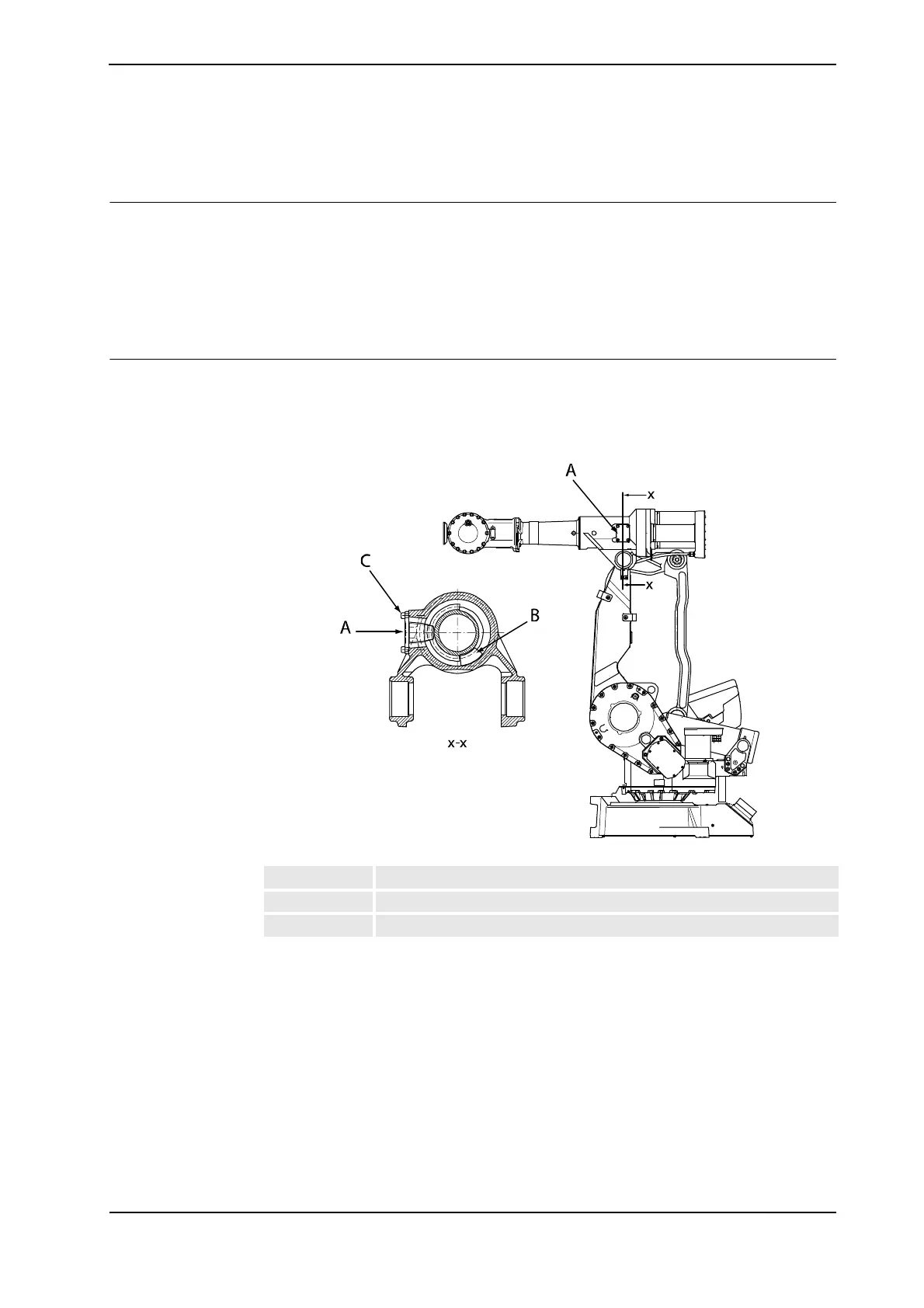
Location of mechanical stop, axis 4
The mechanical stop of axis 4 is located as shown in the figure below.
A more detailed view of the component and its position may be found in chapter Foldouts in
the Product manual, reference information.
xx0300000176
A Mechanical stop axis 4
B Damper axis 4
C Attachment screws, mech stop
Continues on next page

 Loading...
Loading...







