Setup & Operation 4. End Effectors
46 S5 Rev.5
4. End Effectors
4.1 Attaching an End Effector
Create an end effector for your Manipulator that will attach to Arm #6. Before attaching
the end effector to the end of Arm #6, observe these guidelines.
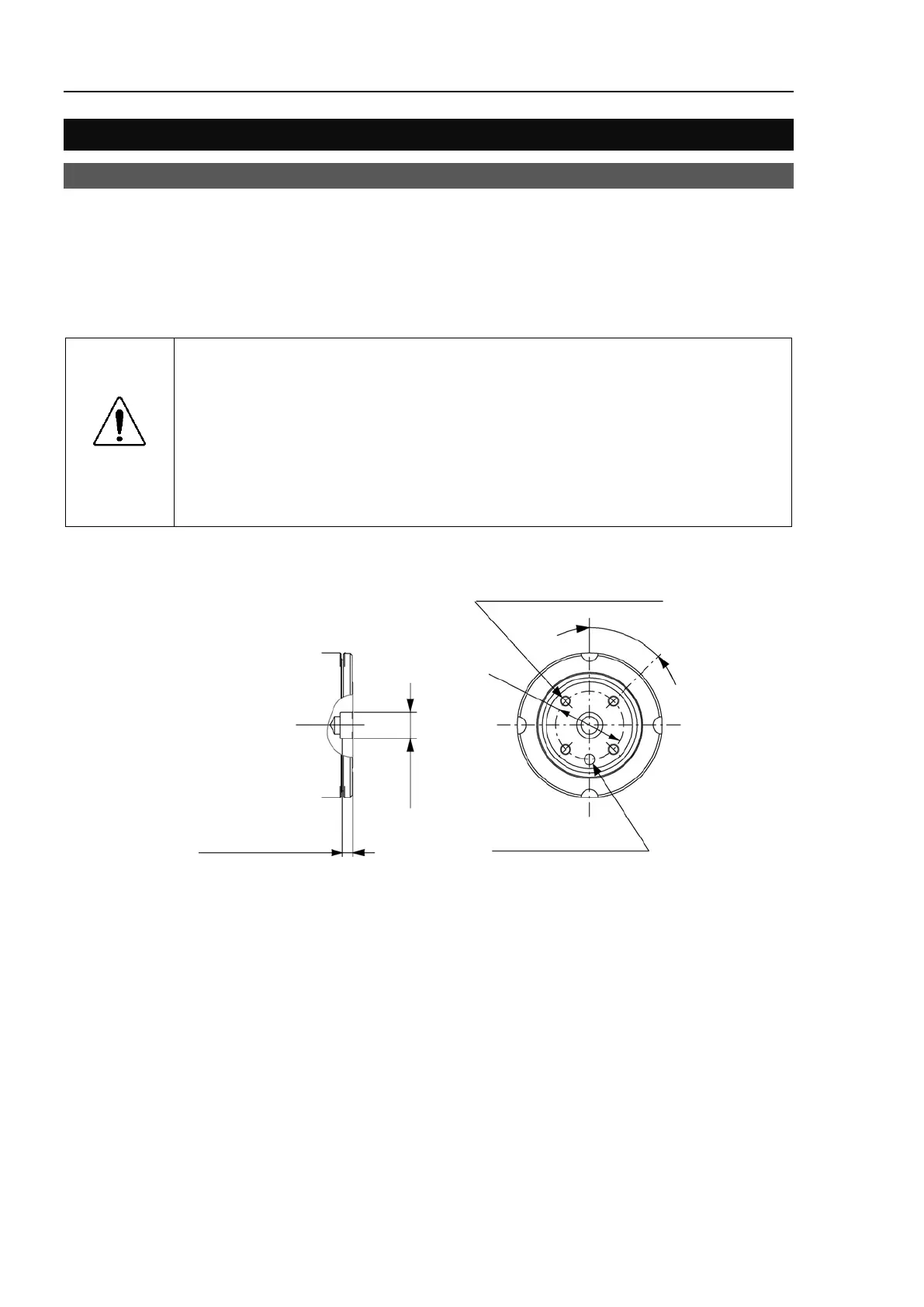
The wrist flange dimensions are shown in the following figure. In order to see the tram
marks, it is recommended that the attachment be mounted inside the fitting. Fitting depth
of inside and outside fittings must be 5 mm or less.
CAUTION
■
If you use an end effector equipped with a gripper or chuck, connect wires and/or
pneumatic
tubes properly so that the gripper does not release the work piece
power to the robot system is turned OFF. Improper connection of the
wires and/or pneumatic tubes may damage the robot system and/or work piece
as the work piece is released when the Emergency Stop switch is pressed.
outputs are configured at the factory so that they are automatically shut off (0)
disconnection, the Emergency Stop switch, or the safety features of the
.
Wrist Flange
4-M5 Tap P0.8 Depth: 9 mm
Wash off anti-corrosive paint (solid yellow paint) on the wrist flange surface with thinner
or light oil before mounting the end effector.
Arm #6
an end effector to the end of the Arm #6 using an M5 bolt.
Layouts
you operate the Manipulator with an end effector, the end effector may
the Manipulator because of
the outer diameter of the end effector, the size of the work
piece
, or the position of the arms. When designing your
system layout, pay close
attention to the interference area of the end effector.
 Loading...
Loading...






