Setup & Operation 5. Motion Range
S5 Rev.5 67
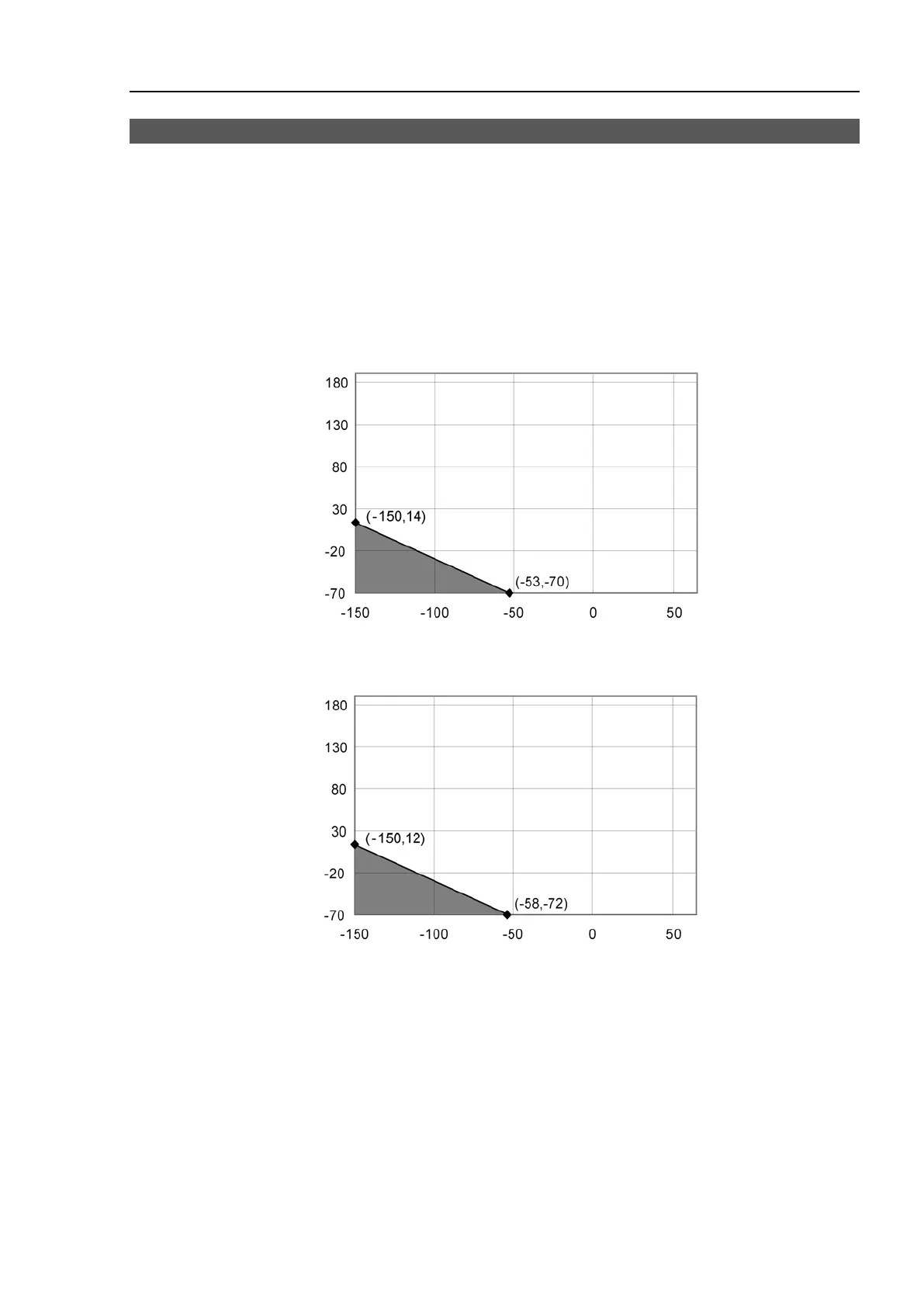
5.2 Restriction of Manipulator Operation by Joint Angle Combination
To prevent the arms of the Manipulator from interfering each other, the Manipulator
operation is restricted in the specified motion range according to the joint angle
combination of the Arm #2, #3, and #4.
The Manipulator operation is restricted and the Manipulator stops when the joint angles of
the Arm are within the gray areas in the following figure.
Combination of Joint #2 and #3
S5-A701**
S5-A901**
 Loading...
Loading...






