Setup & Operation 4. End Effectors
S5 Rev.5 47
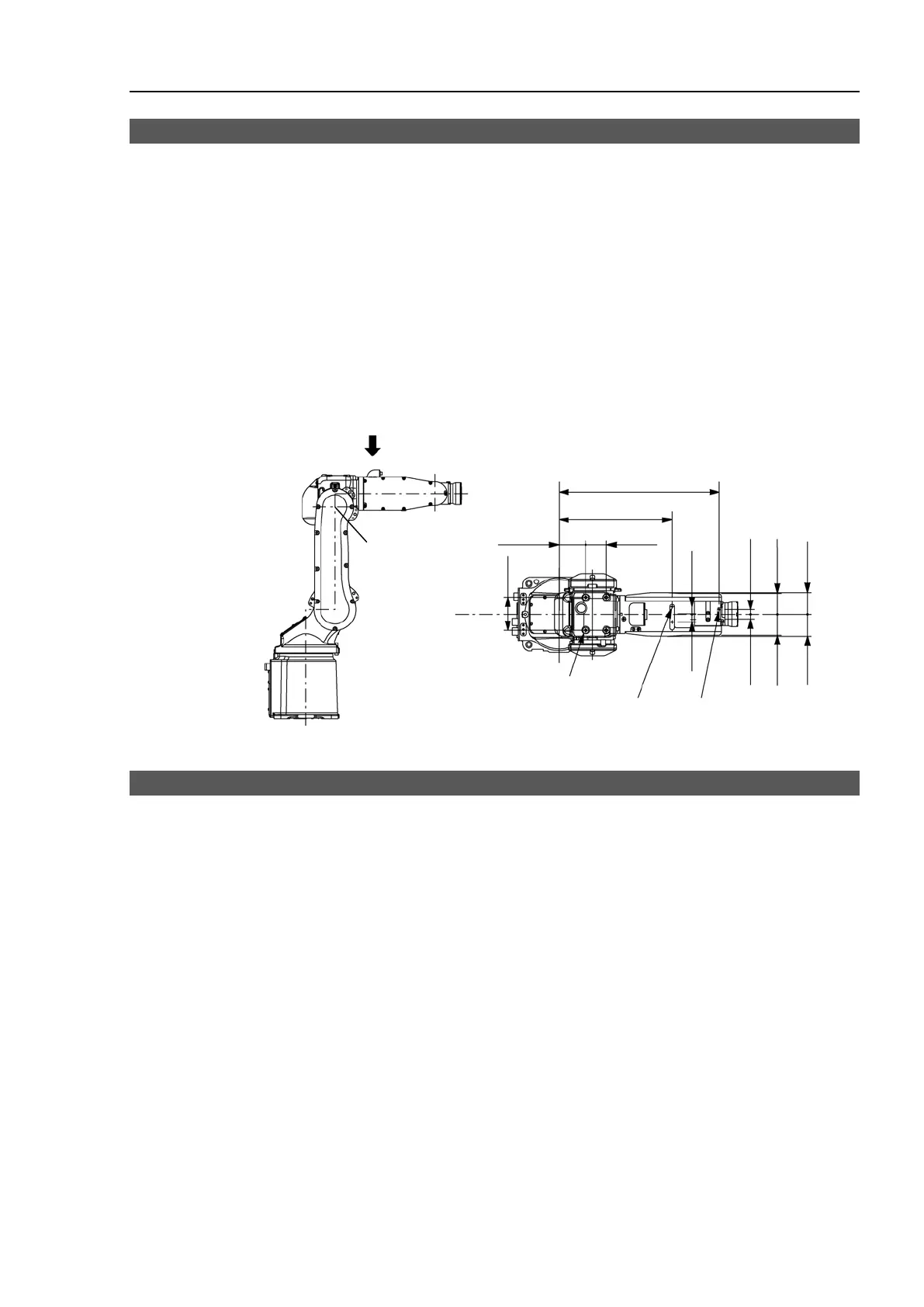
4.2 Attaching Valves
There are two decks on the upper arm called “upper arm rear deck” and “upper arm center
deck” as shown in the figures below to mount peripheral equipment such as valves.
When the weight on the fore-end of Arm #6 is 5 kg or less, the available weight on the
deck is 6 kg or less including the weight on Arm #6. For example, when the weight on
Arm #6 is 5 kg, the remaining 1 kg is available weight on the deck.
For details of the payload exceeding 5 kg, refer to the section Setup & Operation 4.3.1
WEIGHT Setting - “Restriction on payload exceeding 5 kg (more than 5 kg and less than
or equal to 7 kg)”.
Deck on the Upper Arm [Unit: mm]
2-M4×P0.7 Depth 8 mm
View A
Rotation Center
of the Upper Arm
2×2-M4×P0.7 Depth 8 mm
(Front & Back)
-M8×P1.25 Depth 16 mm
4.3 WEIGHT and INERTIA Settings
The WEIGHT and INERTIA commands are for setting the load parameters of the
Manipulator. These settings optimize the Manipulator motion.
WEIGHT Setting
The WEIGHT command is for setting the load weight. The more the load weight
increases, the more the speed and acceleration/deceleration for the Manipulator movement
are reduced.
INERTIA Setting
The INERTIA command is for setting the moment of inertia and the eccentricity of the
load. The more the moment of inertia increases, the more the acceleration and
deceleration of the Arm #6 are reduced. The more the eccentricity increases, the more
the acceleration and deceleration for the Manipulator movement are reduced.
To ensure optimum Manipulator performance, it is important to make sure that the load
(weight of the end effector and work piece) and moment of inertia of the load are within
the maximum rating for the Manipulator, and that Arm #6 does not become eccentric.
 Loading...
Loading...






