4MELFA-BASIC V
Coordinate system description of the robot 4-147
4.5 Coordinate system description of the robot
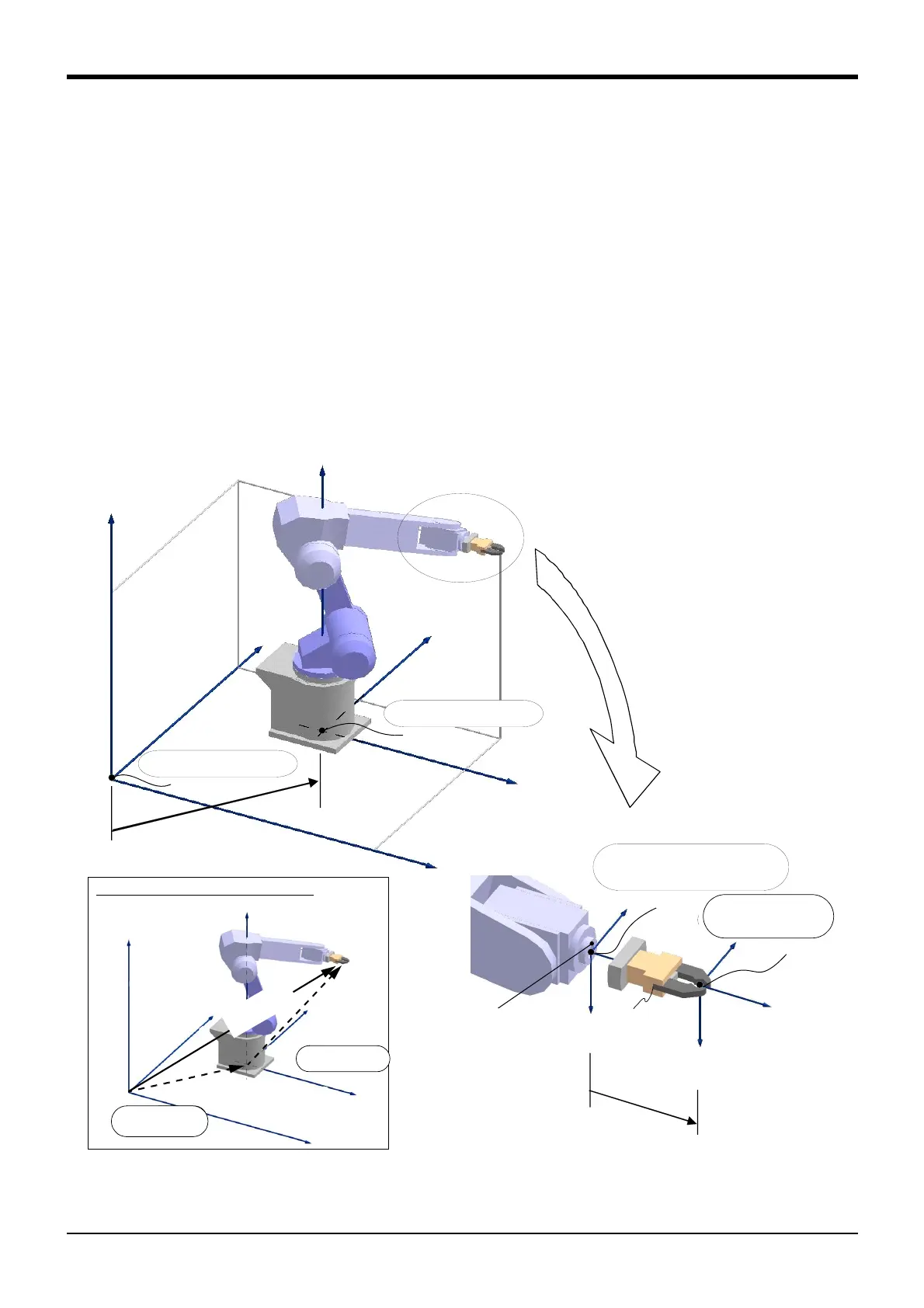
4.5.1 About the robot's coordinate system
The robot's coordinate system has following four.
① World coordinate system: Origin is *1
The coordinate system as the standard for displaying the current position of robot. note 1)
② Base coordinate system: Origin is *2 (J1 axis rotation center on the bottom of the robot.)
A coordinate system established with reference to the robot mounting face. It is set by specifying
parameter MEXBS with data on a center position for robot installation (base conversion data) as
viewed from the world coordinate system or by executing a base command.
By default, because the base conversion data is set to zero (0), the world coordinate system is in
agreement with the base coordinate system.
③
Mechanical interface coordinate system: Origin is *3 (J6 axis rotation center on the tool installation surface.)
A coordinate system established with reference to the robot's mechanical interface.
④ Tool coordinate system: Origin is *4
A coordinate system established with reference to the robot's mechanical interface. Its relation to
the interface coordinate system is determined by the tool data (i.e., by specified settings for param-
eter MEXTL or by the execution of a tool command.)
Fig.4-3:Robot's coordinate system
Zw
Z
Zb
Yw
Y
Yb
Xb
Xw
X
① World coordinate system
②
③
Ym
Xm
Xt
Yt
Zt
base conversion
data
Tool
Mechanical interface surface
base conversion
data
Note 1) Robot's current position
C
u
r
r
e
n
t
p
o
s
i
t
i
o
n
④ Tool coordinate
system
Base coordi-
nate system
World coordi-
nate system
Base coordinate system
Mechanical interface
coordinate system
*1: Origin
*2: Origin
*3: Origin
*4: Origin
 Loading...
Loading...




