3-22 Jog Feed (Overview)
3Explanation of operation methods
If the robot's control point comes near a singular point during the operation of TOOL jog, XYZ jog, CYLIN-
DER jog or WORK jog mode among the types of jog feed listed in Table 3-1, a warning mark is displayed on
the T/B screen together with the sound of buzzer to warn the operator. It is possible to set this function valid
or invalid by parameter MESNGLSW. (Refer to Page 438, "5 Functions set with parameters".) Please refer
to Page 498, "5.17 About the singular point adjacent alarm" for details of this function.
3.2.2 Speed of jog feed
The current speed (%) is displayed on the screen. To change these values, press either the [OVRD↑] /
[OVRD↓] key. The following types of jog feed speed are available.
[OVRD↑] key ------------------------------------------------------------- [OVRD↓] key
LOW and HIGH are fixed-dimension feed. In fixed-dimension feed, the robot moves a fixed amount every
time the key is pressed. The amount of movement depends on the individual robot.
Table 3-2: An example of fixed-dimension
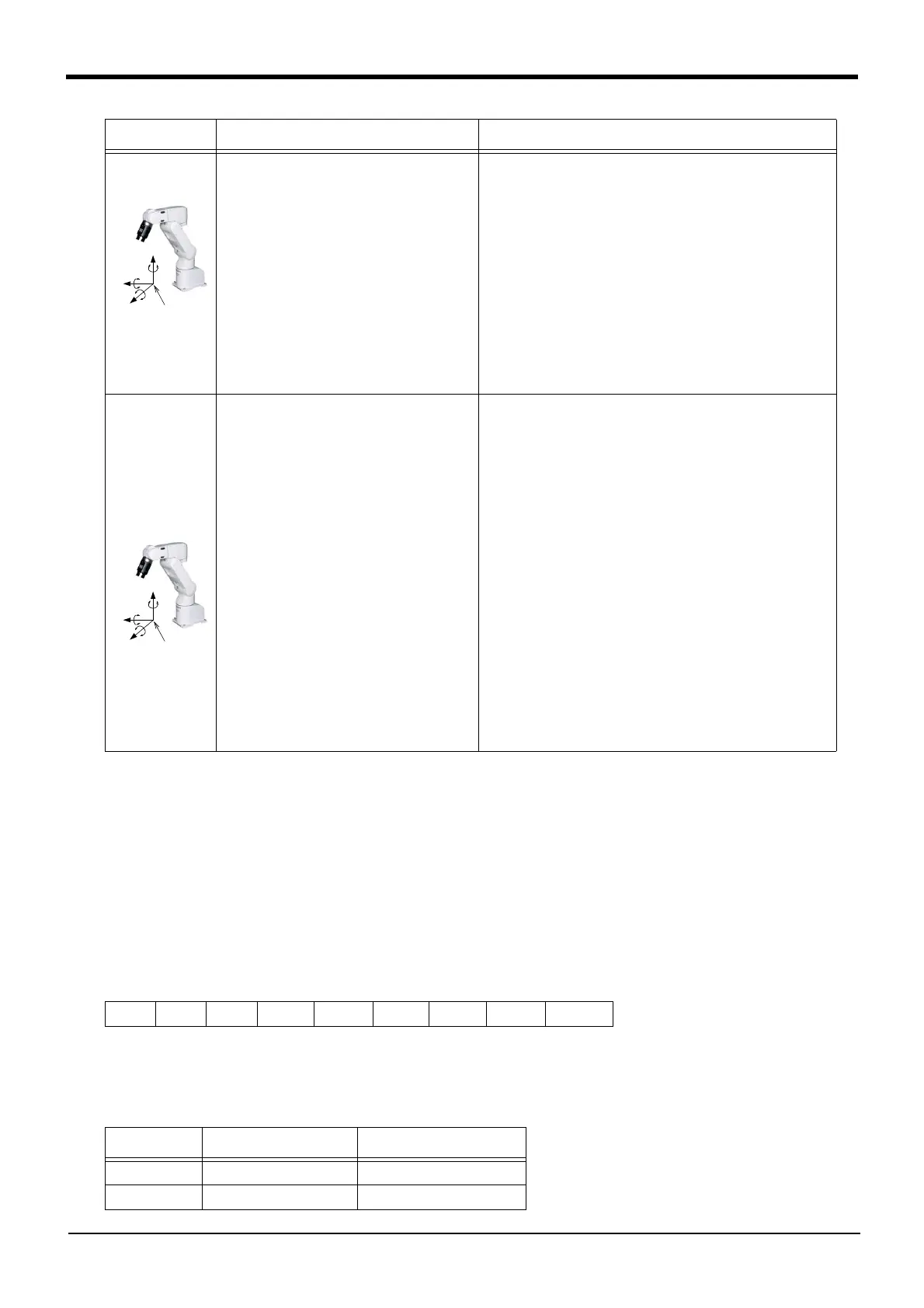
WORK jog
(WORK jog mode)
Perform steps 1) to 3) above.
4) Press the function key to change to the
WORK jog mode.
5) Press the key corresponding to each of the
axes from X,Y,Z,A,B,C.
It is necessary to set "0 (Work jog mode)" in the parameter
WKnJOGMD (n = 1 to 8) in advance to perform this jog opera-
tion.
The axes are adjusted linearly with respect to the work coordi-
nate system.
The posture rotates around the X, Y, and Z axes of the work
coordinate system by pressing the A, B, and C keys, without
changing the actual position of the hand tip. It is necessary to
specify the tool length in advance using the MEXTL parameter.
Notes) Work coordinate system:
Set up beforehand.(eight kinds setting is available)
If the work coordinate system is not set up, will move by
the XYZ jog.
Refer to separate manual: "ROBOT ARM SETUP &
MAINTENANCE"
WORK jog
(Ex-T jog mode)
This function can
be used with in the
following software
version.
F-Q series:
R5 or later
F-D series:
S5 or later
Perform steps 1) to 3) above.
4) Press the function key to change to the
WORK jog mode.
5) Press the key corresponding to each of the
axes from X,Y,Z,A,B,C.
It is necessary to set "1 (Ex-T jog mode)" in the parameter
WKnJOGMD (n = 1 to 8) in advance to perform this jog opera-
tion.
The axes are adjusted linearly with respect to the work coordi-
nate system.
The posture rotates around the X, Y, and Z axes of the work
coordinate system by pressing the A, B, and C keys, without
changing the actual position of the hand tip.
By pressing the A, B, and C keys, the control point can be
rotated around the X, Y, and Z axes of the same work coordi-
nates system while changing the actual position of the hand tip.
It is necessary to specify the tool length in advance using the
MEXTL parameter.
Notes) Work coordinate system:
Set up beforehand.(eight kinds setting is available)
If the work coordinate system is not set up, will move by
the XYZ jog.
Refer to separate manual: "ROBOT ARM SETUP &
MAINTENANCE"
When the work coordinates system is not specified, the XYZ
jog operation is performed by pressing the X, Y, and Z keys.
The rotating operation around the robot origin coordinates sys-
tem is performed by pressing the A, B, and C keys.
LOW HIGH 3% 5% 10% 30% 50% 70% 100%
JOINT jog TOOL, XYZ jog
LOW 0.01 deg. 0.01 mm
HIGH 0.10 deg. 0.10 mm
Type Operation Explanation
 Loading...
Loading...




