Appendix-680 Ex-T control
7Appendix
7.4.3 Ex-T jog
The Ex-T jog is the function to perform jog operation along the work coordinates system (Ex-T coordinates
system) by specifying the work coordinates (Ex-T coordinates) as the control point. The operation is similar
to the conventional WORK jog operation because the operation is performed along the work coordinates
system, but operations related to the posture elements are different between the Ex-T jog and the conven-
tional WORK jog.
The Ex-T jog operation is performed by the WORK jog operation of TB. The conventional WORK jog opera-
tion and the Ex-T jog operation modes can be switched by setting the parameters WK1JOGMD to
WK8JOGMD of each work coordinates system (Ex-T coordinates system).
Differences of operations according to the parameter WK1JOGMD to WK8JOGMD setting are shown below
for each robot model.
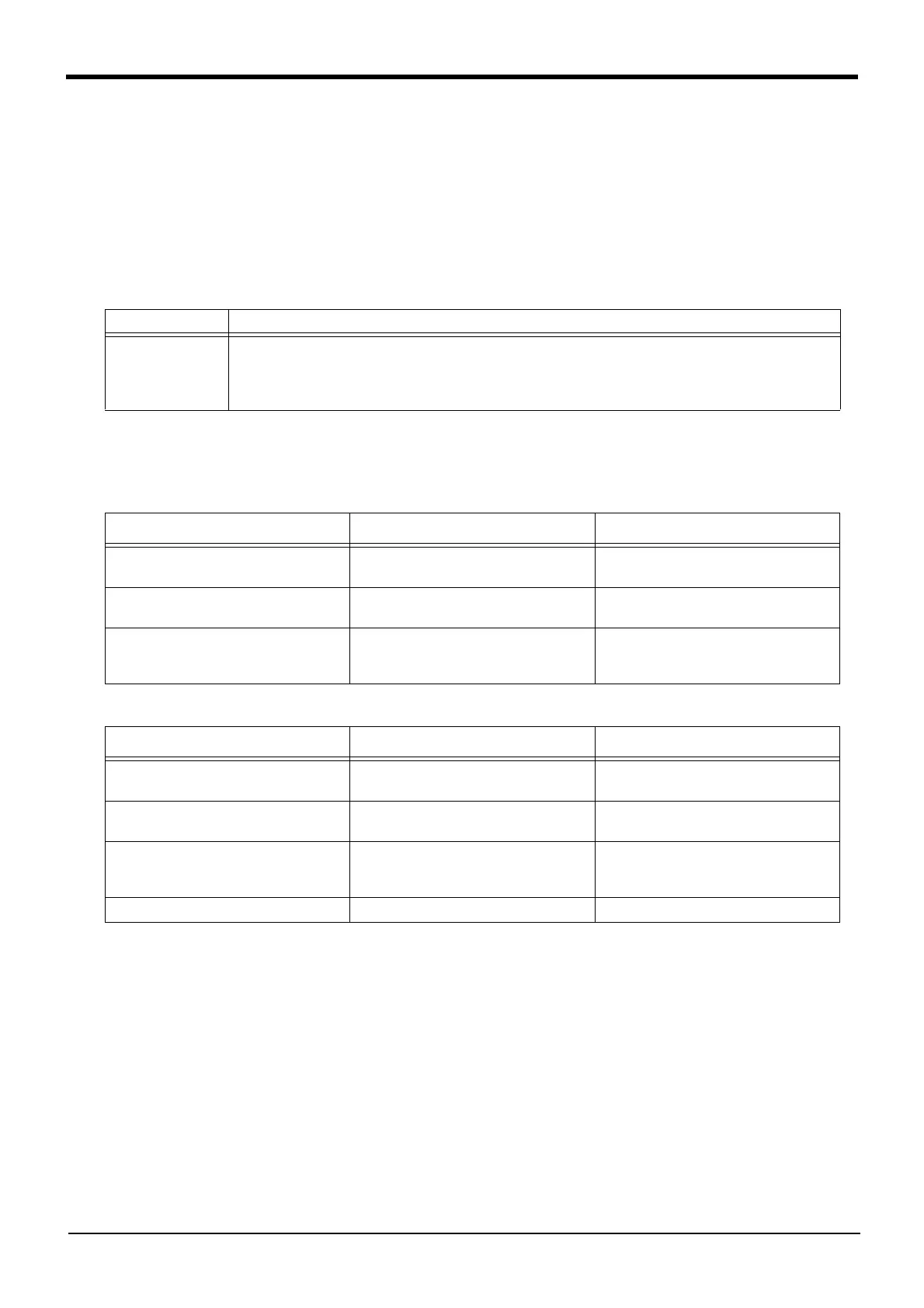
WORK jog operation of the RV 6-axis type
RH 4-axis type and RH 4-axis hanging type
The movement of posture elements of the robot differs between the conventional WORK jog and the Ex-T
jog operations. For example, the difference of the movement of C element is described below.
Parameter name Details explanation
WKnJOGMD
"n" is 1 to 8
The operation mode in WORK jog operations is specified for each work coordinate.
0: WORK jog (The operation of A, B, and C elements is rotation around the axis parallel to the X, Y, and Z axes
of the work coordinates. The control point position does not change.)
1: Ex-T jog (The operation of A, B, and C elements is rotation around the X, Y, and Z axes of the work coordi-
nates with the control point moving.
WORK jog operation mode WORK jog Ex-T jog
Parameters WKnJOGMD (n is 1 to8) set-
ting
0 (initial value)
1
XYZ key operation Moves along each axis of the work
coordinates system
Same as the conventional WORK jog
ABC key operation With the control point position maintained,
the direction changes along the work
coordinates system.
While the control point position is
changed, the direction changes on each
axis of the work coordinates system.
WORK jog operation mode WORK jog Ex-T jog
Parameters WKnJOGMD (n is 1 to8) set-
ting
0 (initial value)
1
XYZ key operation Moves along each axis of the work
coordinates system
Same as the conventional WORK jog
C key operation With the control point position maintained,
the direction changes along the work
coordinates system.
While the control point position is
changed, the direction changes on the Z
axis of the work coordinates system (Zw).
AB key operation The robot does not move. The robot does not move.
 Loading...
Loading...




