Appendix-692 Cooperative operation function
7Appendix
7.5 Cooperative operation function
7.5.1 Outline
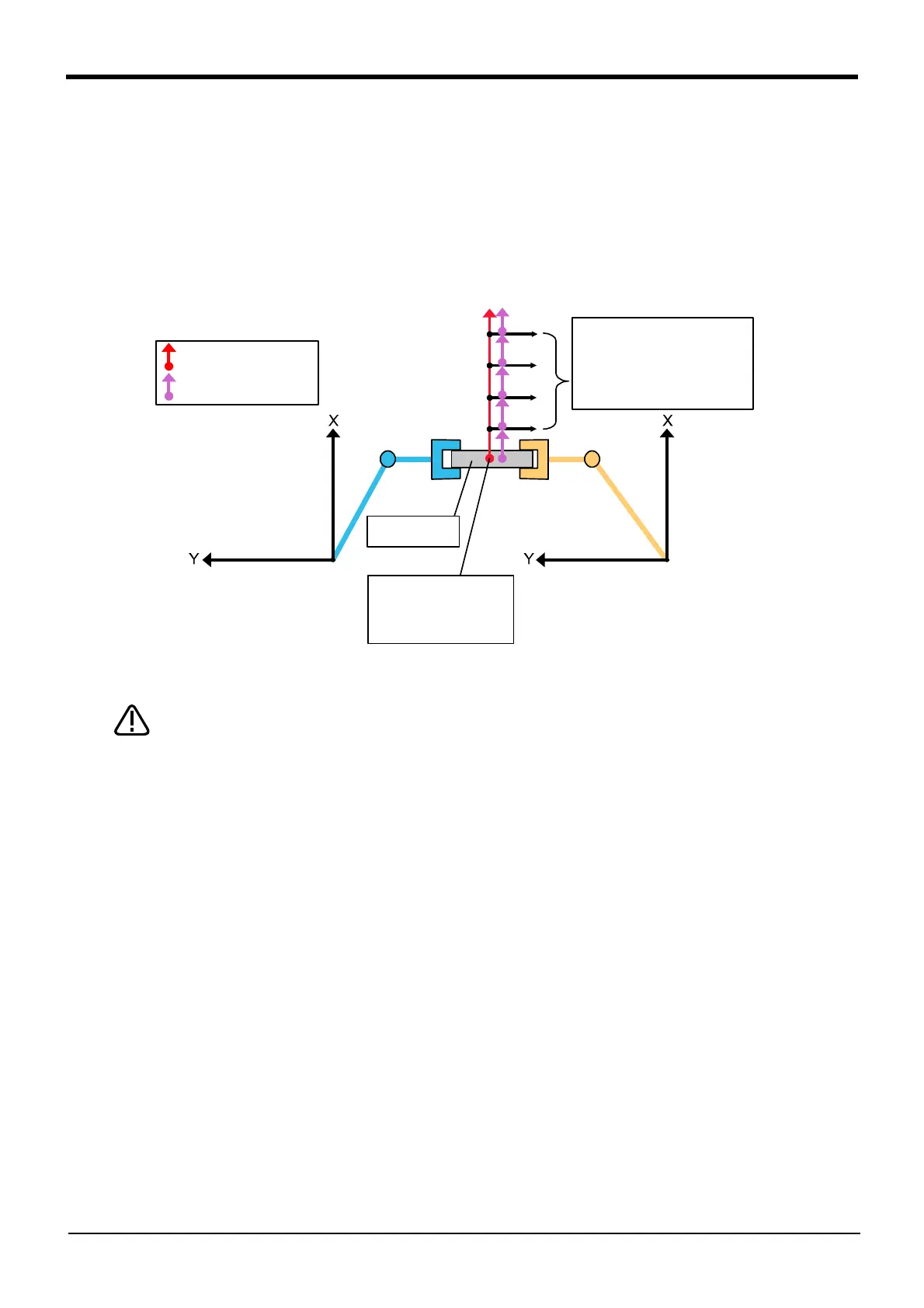
The cooperative operation function by two robots enables the transportation that two robots grasp the target
workpiece at one end, respectively, together in synchronization.
A position-tracking control of robots enables this operation. After the common coordinates are set in a mas-
ter robot (robot No.1) and a slave robot (robot No.2), robot No.2 obtains the current position data of robot
No.1 every controller control time (approximately 7.1 msec) via a PLC, and tracks robot No.1 operation.
Fig.7-119:Cooperative operation
The accuracy of the transport path by both robots operation and the tracking
intervals of robot No.2 are not guaranteed.
When the operation speed of robot No.1 is set to high, the operation of robot
No.2 may be delayed.
: Robot No.1 motion path
: Robot No.2 motion path
Robot No.1
(Master)
Robot No.2
(Slave)
Workpiece
Robots' synchronized
points on the workpiece
transport path
Robot No.2 obtains the current
position data of robot No.1 at
established intervals and tracks
the position.
(Example command: Mxt 1,0)
 Loading...
Loading...




