5Functions set with parameters
About Standard Base Coordinates 5-473
5.7 About Standard Base Coordinates
The position of the world coordinate system is set to zero (0) before leaving the factory, and therefore, the
base coordinate system (robot's installation position) is in agreement with the world coordinate system
(coordinate system which is the basis for robot's current position).
By utilizing the base conversion function, you can set the origin point of the world coordinate system at a
location other than the center of the J1 axis.
Executing the base conversion function causes a change in the positional relation between the world
coordinate system and the base coordinate system, and the robot, if allowed to move to a position to which
it has been taught to move, will move to other than the position it used to. Therefore, you should maintain
positive control over relation between the base conversion and the position which the robot is taught to take
so that an effective use of the base conversion function is insured. Four methods are available for setting
the world coordinate system:
1) Specifying parameter MEXBS directly with base conversion data
2) Specifying parameter MEXBSNO with a base coordinate number
3) Specifying the J1axis offset angle using parameter J1OFFSET (vertical 5-axis type robot only)
4) Executing a relevant base command under the robot program
The factory default setting value is set to zero at the base coordinate system position, which is identical to
the robot origin.
Structure of base coordinate system data: X, Y, Z, A, B, and C
X, Y and Z axis: The position of robot coordinate system from the base coordinate system origin
A axis: X-axis rotation in the world coordinate system
B axis: Y-axis rotation in the world coordinate system
C axis: Z-axis rotation in the world coordinate system
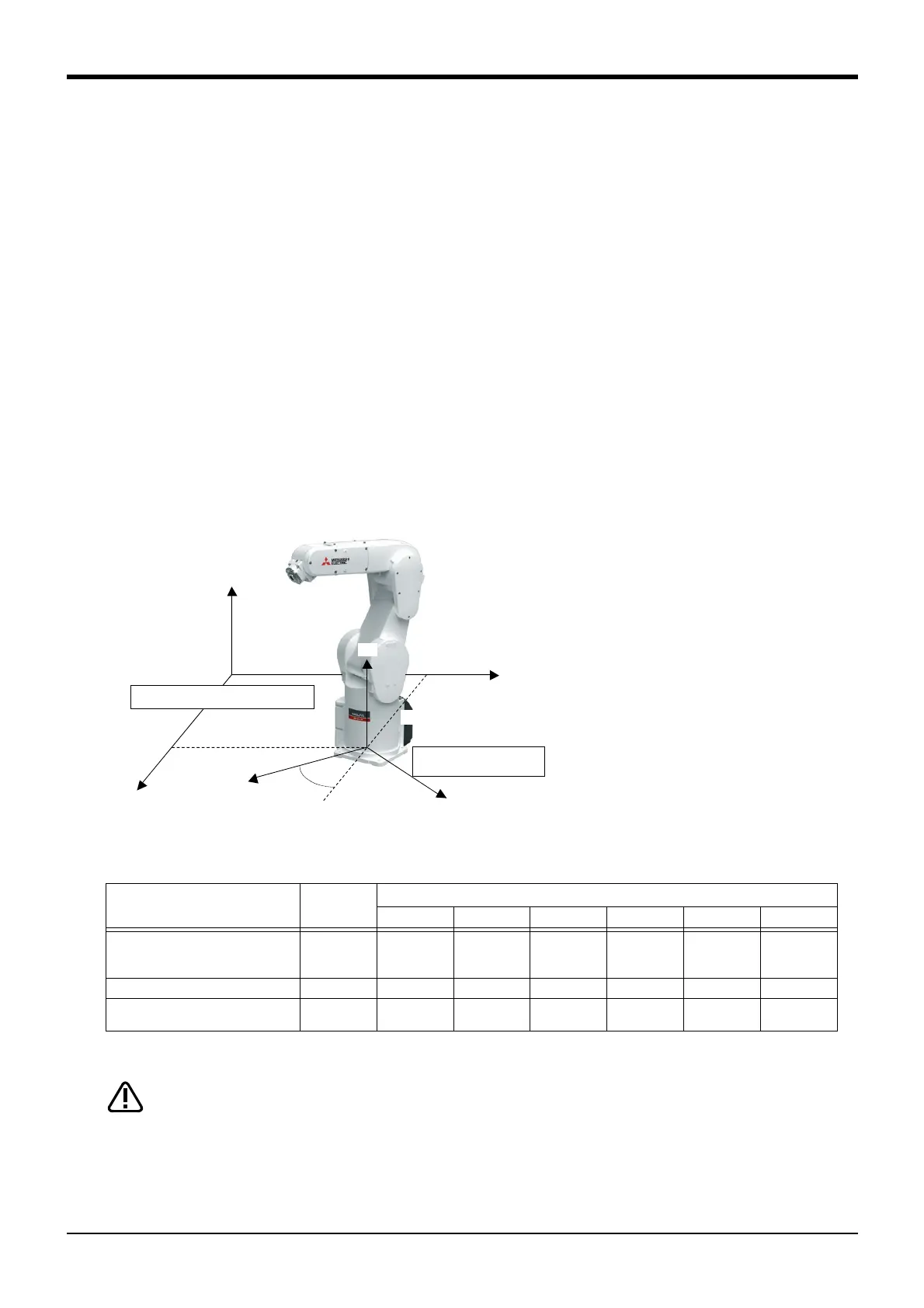
(Example)
1) Sample parameter setting
Parameter name: MEXBS
Value: 100,150,0,0,0,-30
2) Sample Base instruction setting
1 Base (100,150,0,0,0,-30)
Normally, the base coordinate system
need not be changed. If you wish to
change it, see the sample above when
configuring the system. Note that the
Base instruction within the robot pro-
gram may shift the robot to an unex-
pected position. Exercise caution when
executing the instruction.
An axis element of the base conversion
data may or may not be valid depending
on the robot model.
See Table 5-9 to set the appropriate
data.
Table 5-9:Valid axis elements of the base conversion data depending on the robot model
Since the performance of the base conversion causes the reference for the robot's current
position to change, data taught till then becomes unusable as it is.
If the robot is inadvertently allowed to move to a position taught before the performance of
the base conversion, it can stray to an unexpected position, possibly resulting in property
damage or personal injury.
When using the base conversion function, be sure to maintain positive control over relation
between the base coordinate system subject to conversion and the position which the
robot is taught to take so that a proper robot operation and an effective use of the base
conversion function are insured.
Type
Number of
axis
An axis element of the base conversion data
Note1)
Note1) ○ : Valid, △ : Unused. This is meaningless and ignored if set., ×: The setting value is fixed to 0.
XYZABC
RV-2F, RV-4F series, RV-7F
series, RV-13F series, RV-20F,
RV-50F series
6
○○○○○○
RV-4FJL
5
○○○△△○
Note2)
Note2) Set a value in parameter J1OFFSET.
RH-3FH/6FH/12FH/20FH series,
RH-3FHR series
4
○○○△△○
150mm
Cr
-
3
0
°
Zw
Yw
Xw
Yb
Xb
Zb
100mm
World coordinate system: Xw, Yw, Zw
Base coordinate system:
Xb, Yb, Zb
Note) The figure is an example of a vertical 6-axis robot.
In horizontal 4-axis robot is the same.
 Loading...
Loading...




