7Appendix
Ex-T control Appendix-677
7.4 Ex-T control
Spline interpolation, one of the robot movement commands, is explained in this section.
7.4.1 Outline
(1) Features
The Ex-T control is the function to operate the robot using the origin of the externally fixed coordinates sys-
tem as the robot control point. The examples of applications include the following.
• Polishing
The robot holds the target workpiece, and pushes it against the fixed grinder or abrasive belt for deburring or
surface finishing.
• Coating
The robot holds the target workpiece, and applies solvent or adhesive supplied from the fixed dispenser to
the workpiece.
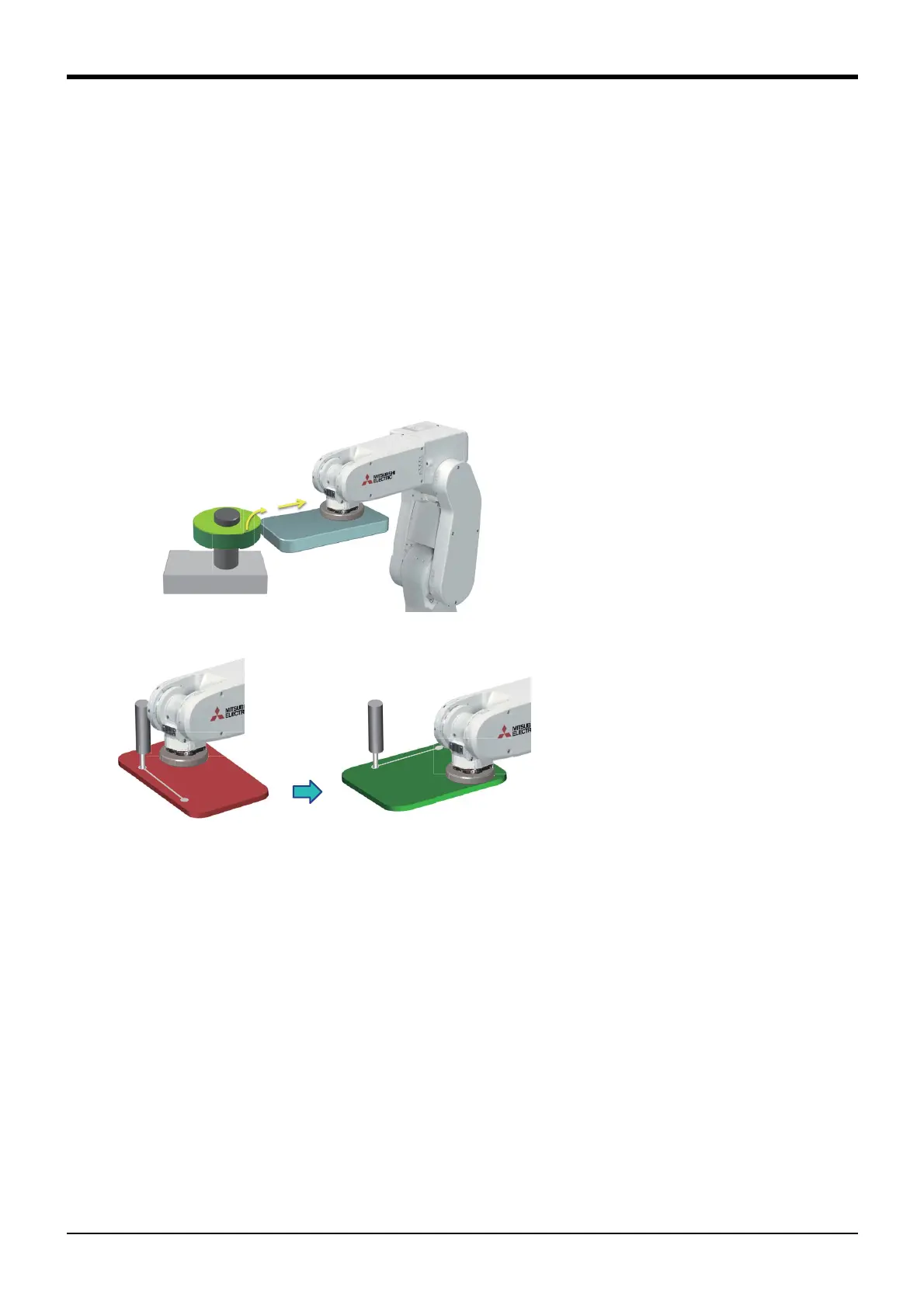
Fig.7-113:Example of polishing
Fig.7-114:Example of coating
When the fixed tool (grinder, dispenser, etc.) is used and processing (deburring, polishing, sealing, etc.) of
workpieces held and moved by the robot is performed as shown in the figure above, it is quite difficult to cre-
ate a program for movement along the specified processing route while maintaining the relative position
between the tool and the workpiece.
The Ex-T control is the function to facilitate operations in such applications and programming. The grinder or
dispenser position can be registered in the robot, which enables linear/circular arc operations using the
position as a reference.
Fix the tool and move
the workpiece.
Grinder
(fixed)
Workpiece
(moving)
 Loading...
Loading...




