3-24 Jog Feed (Overview)
3Explanation of operation methods
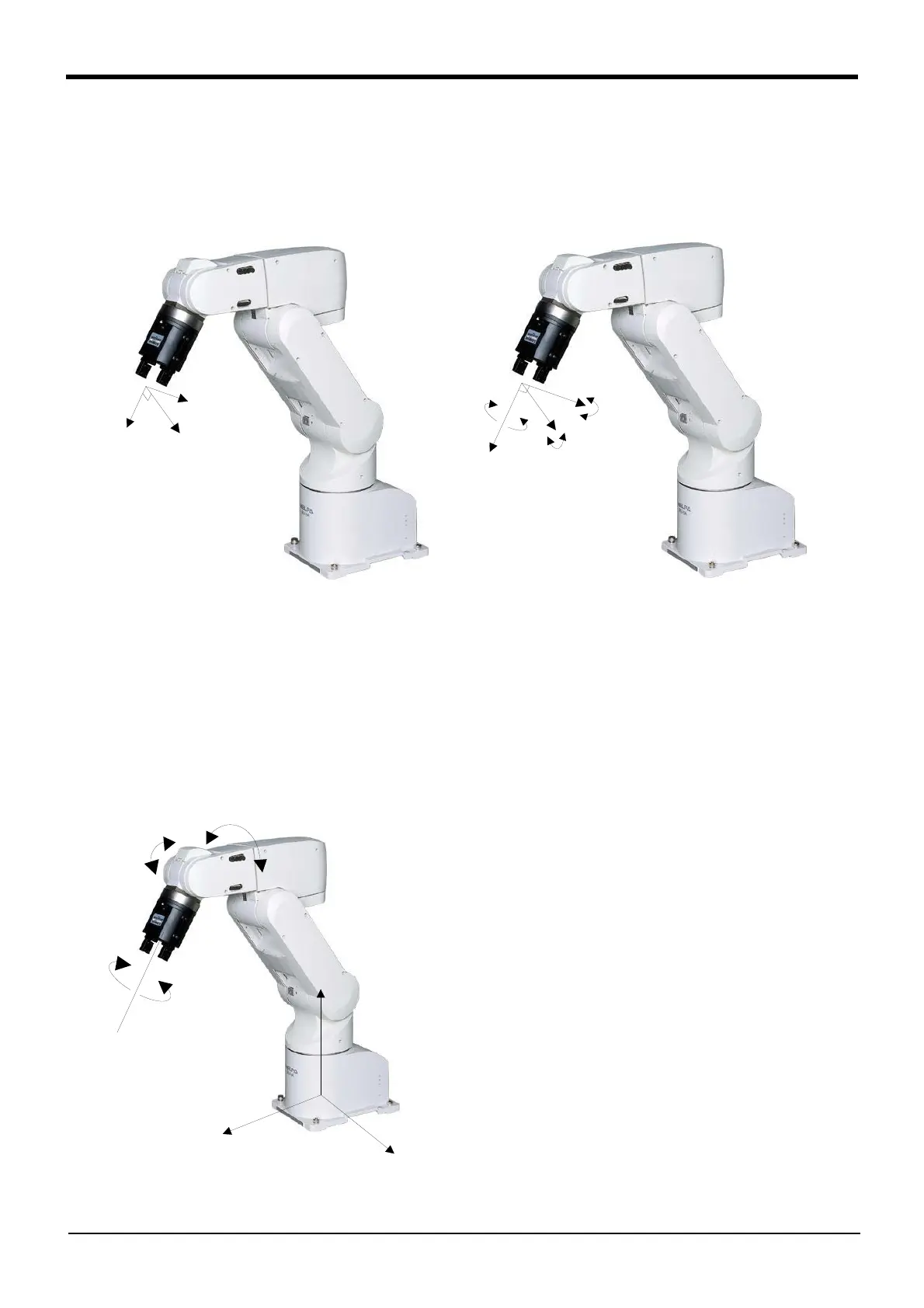
3.2.5 TOOL jog
Adjusts the coordinates of each axes along the direction of the hand tip.
The X, Y, and Z axis coordinates are adjusted in mm units. The A, B, and C axis coordinates are adjusted in
angle units.
3.2.6 3-axis XYZ jog
Adjusts the X, Y, and Z axis coordinates along the direction of the robot coordinate system in the same way
as in XYZ jog feed. The J4, J5 and J6 axes perform the same operation as in JOINT jog feed, but the pos-
ture changes in order to maintain the position of the control point (X, Y and Z values).
The X, Y, and Z axis coordinates are adjusted in mm units. The J4, J5, and J6 axis coordinates are adjusted
in angle units.
+J4
-
J4
+J5
-
J5
+J6
-
J6
+X
+Y
+Z
 Loading...
Loading...




