6External input/output functions
Enable/disable status of signals 6-571
6.4 Enable/disable status of signals
Note that depending on the input signal type, the function may not occur even if the target signal is input
depending on the robot state at that time, such as during operation or when stop is input.
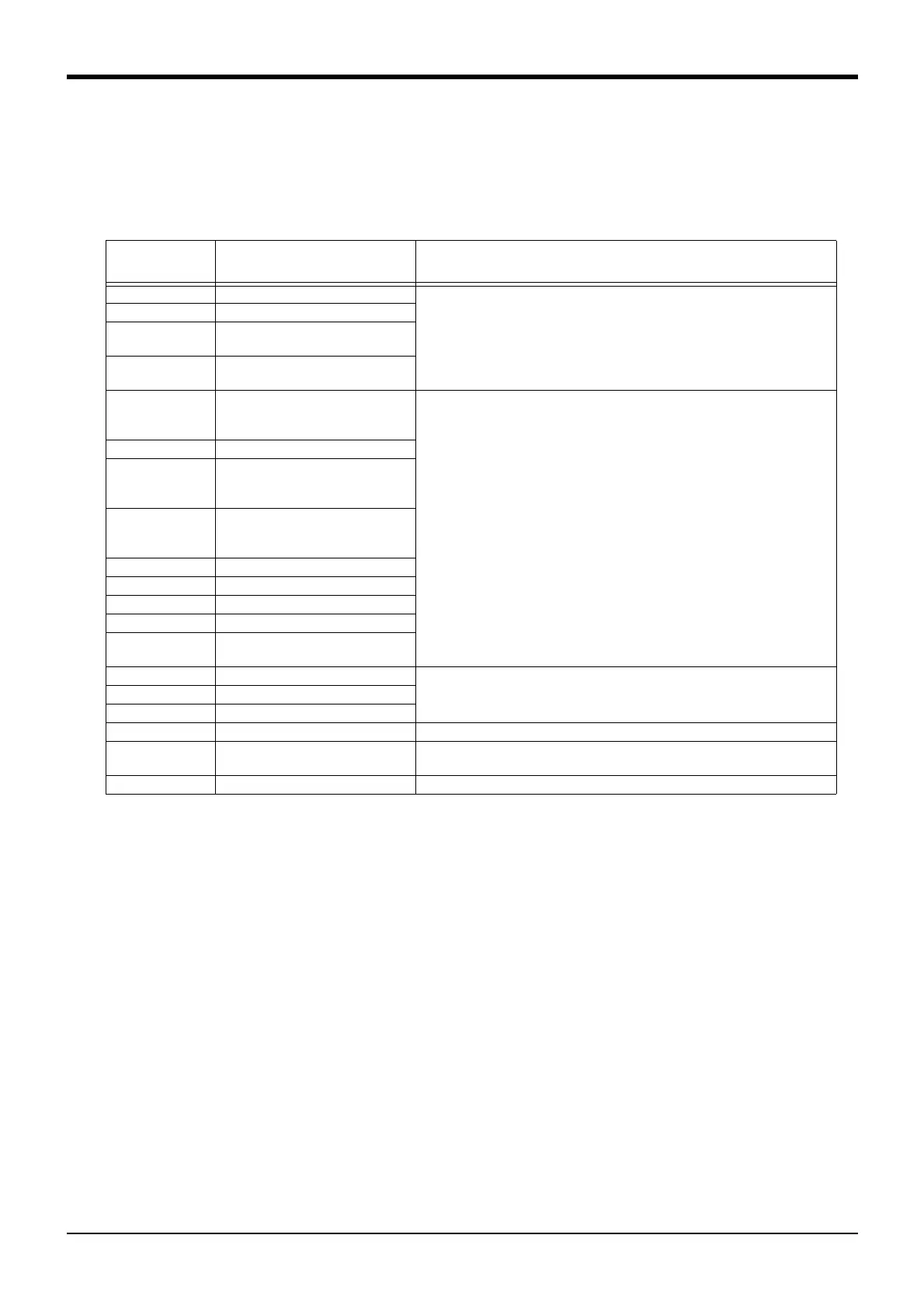
The relation of the robot status to the input signal validity is shown below.
Table 6-7:Validity state of dedicated input signals
Parameter
name
Name Validity of symbol on left according to robot states.
SLOTINIT Program reset
These do not function in the operation state (when START output is ON).
SAFEPOS Safe point return input
OUTRESET General-purpose output signal
reset
MnWUPENA Mechanism n warm-up operation
mode enable input
START
SnSTART
(n=1 to 32)
Start input
These function only when the external input/output has the operation rights
(when IOENA output is ON).
SLOTINIT Program reset
SRVON
MnSRVON
(n=1 to 3)
Servo ON input
MELOCK
MnMELOCK
(n=1 to 3)
Machine lock input
SAFEPOS Safe point return input
PRGSEL Program selection input
OVRDSEL Override selection input
JOGENA Jog enable input
MnWUPENA Mechanism n warm-up operation
mode enable input
START Start input
These do not function in the stop input state (when STOPSTS is ON).SAFEPOS Safe point return input
JOGENA Jog enable input
SRVON Servo ON input This does not function in the servo OFF input state.
MELOCK Machine lock input This functions only in the program selection state (when SLOTINIT output
is ON).
PRGSEL Program selection input The signal does not function during pause status (STOP output is on).
 Loading...
Loading...




