Appendix-668 Spline interpolation
7Appendix
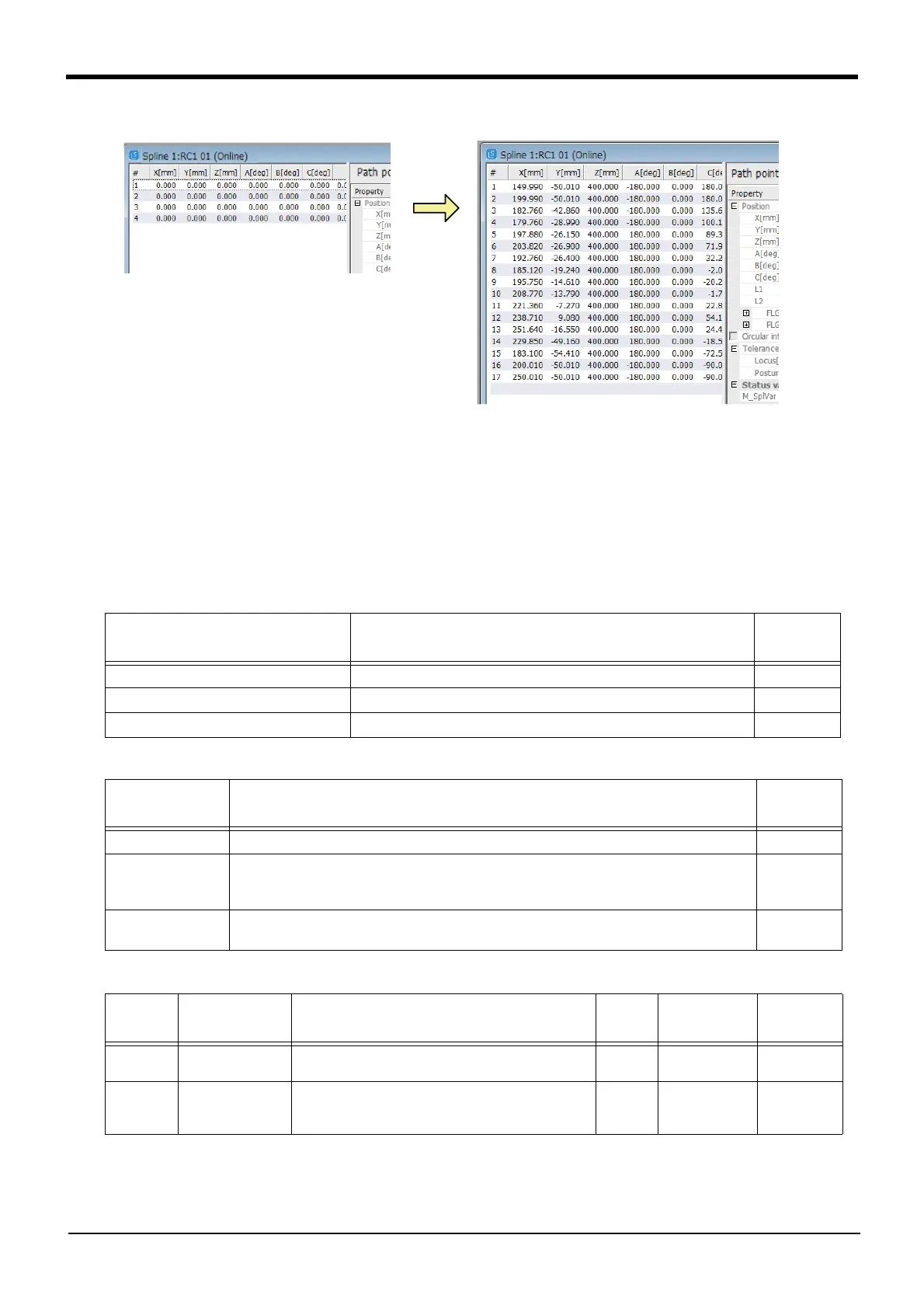
Fig.7-102:Import position variable
7.3.6 Creating the robot program
The robot program is created in the program edit screen of RT ToolBox2 or the teaching pendant.
To execute spline interpolation, use the commands and robot status variables listed in Table 7-16 and Table
7-18. Refer to sections Page 168, "4.13 Detailed explanation of command words" and Page 311, "4.14
Detailed explanation of Robot Status Variable".
Table 7-16:Commands used with spline interpolation
Table 7-17:Functions used with spline interpolation
Table 7-18:Robot status variables related to spline interpolation
Command word Explanation
Reference
page
MvSpl (Move Spline) Executes spline interpolation. 263
EMvSpl (E Move Spline) Executes Ex-T spline interpolation. 227
SetCalFrm (Set Calibration Frame) Sets the coordinate system used with frame transformation. 289
Function name Explanation
Reference
page
SplPos Substitute the path point data registered in the specified spline file for the position variable. 430
SplSpd Substitute the speed at which an L2611 (path point is too close) error does not occur when
executing the MvSpl/EMvSpl commands for the speed variable based on the specified spline
file path point data.
431
SplECord Substitute the Ex-T coordinate system origin data registered in the specified spline file for the
position variable.
429
Variable
name
No. of array
elements
Details
Attribute
Note1)
Note1) R......................................... Read-only.
RW ..................................... Read and write possible.
Data type
Reference
page
M_SplPno Mechanism No.
(1 to 3)
The number of the path point passed through most
recently is returned.
R Integer 363
M_SplVar Mechanism No.
(1 to 3)
The setting value of the most recent path point data is
returned.
The value can be rewritten.
RW Integer 364
 Loading...
Loading...




