7Appendix
Cooperative operation function Appendix-697
7.5.5 Adjustment
(1) Adjustment 1: Adjustment of the common base coordinates
Use the robot program BFRM.prg to set the common coordinates in robot No.1 and robot No.2. (Use the
setting of the robot No.1 base coordinates for robot No.2 base coordinates.)
■Outline of setting procedure
1) Set the position data (PPL1, PPL2, and PPL3) to define the common frame coordinates in robot No.1
and robot No.2. (Specify the common position data in the common frame coordinates of robot No.1
and robot No.2.)
2) Set the common frame coordinates in robot No.1 and robot No.2.
<Program>
PFR1=Fram(PPL1,PPL2,PPL3) ‘Calculate the origin data of common frame of robot No.1.
PFR2=Fram(PPL1,PPL2,PPL3) ‘Calculate the origin data of common frame of robot No.2.
3) Use the setting of the robot No.1 base coordinates for robot No.2 base coordinates. (setting on robot
No.2 only)
<Program>
Share the setting of the robot No.1 base coordinates with robot No.2.
PBTMP=PFR2*Inv(PFR1)
PBASE=Inv(PBTMP)
Base PBASE ‘Set the base coordinate.
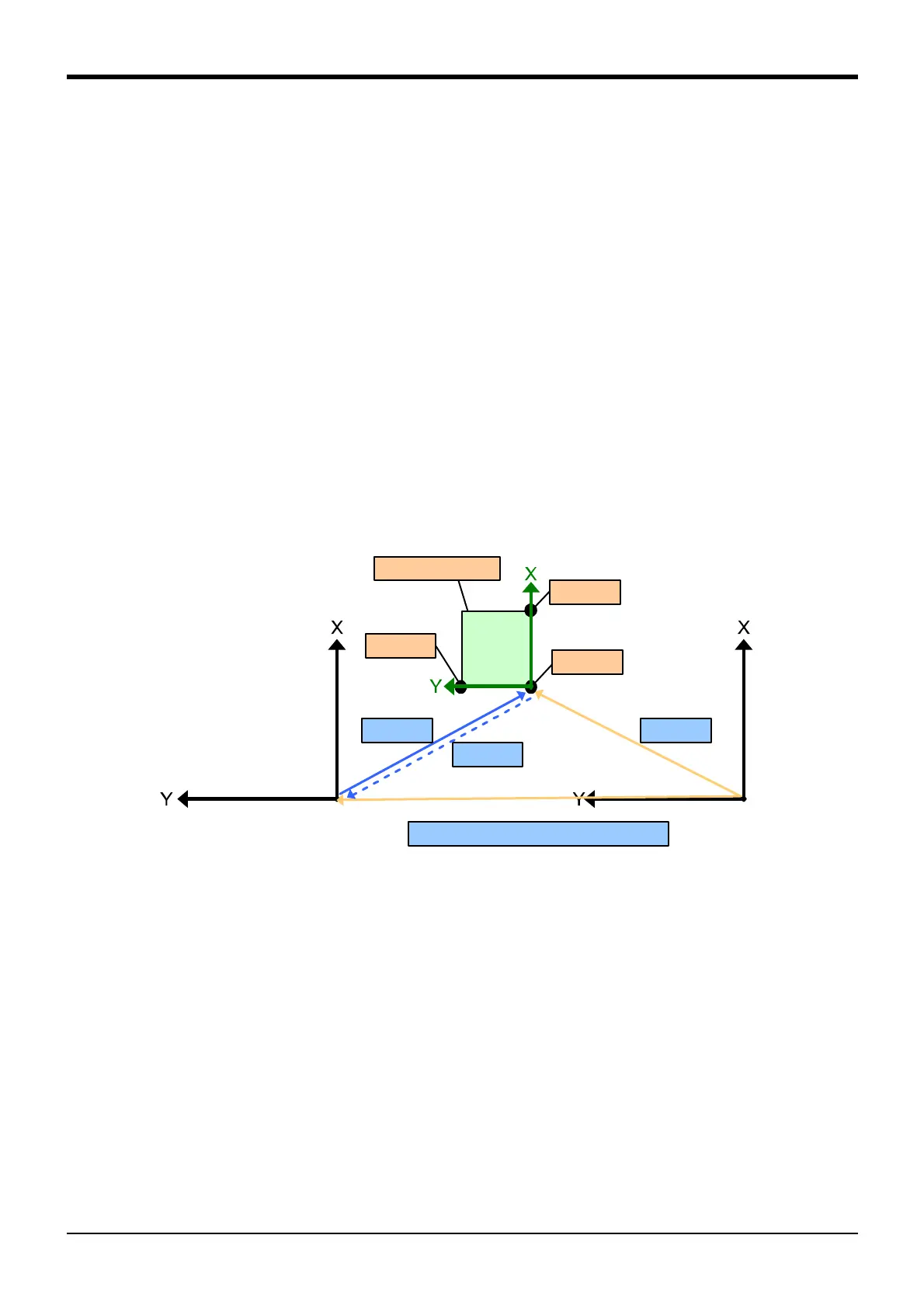
Fig.7-121:Adjustment of the common base coordinates
Common frame
PPL2
PPL1
PPL3
PFR1
Inv(PFR1)
PFR2
PBASE=Inv(PFR2*Inv(PFR1))
Robot No.1
(Master)
Robot No.2
(Slave)
 Loading...
Loading...




