Commissioning via the built-in BOP
5.6 Function commissioning
SINAMICS V20 Converter
Operating Instructions, 10/2019, A5E34559884-012
119
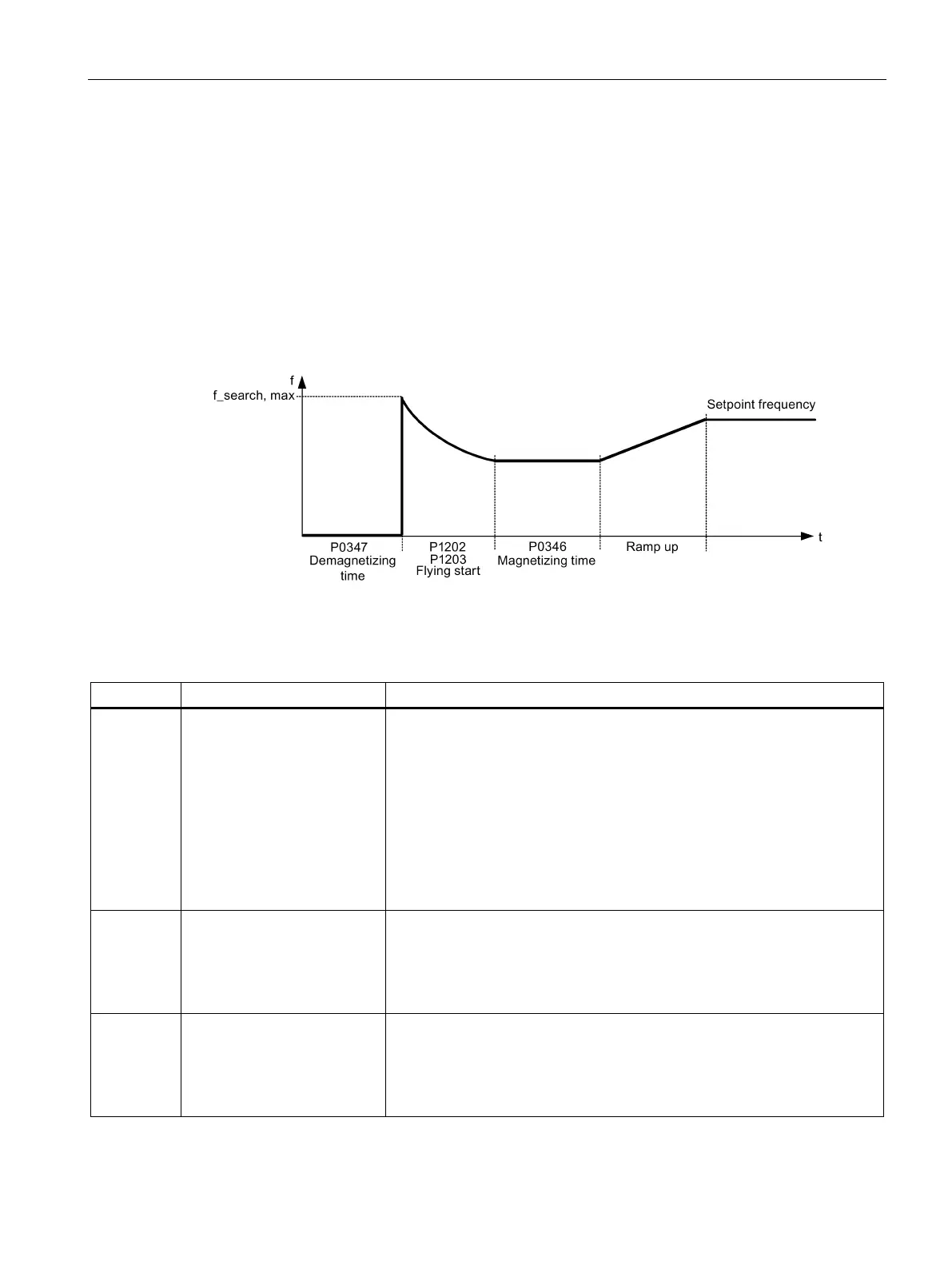
5.6.3.8 Setting the flying start function
Functionality
The flying start function (enabled using P1200) allows the converter to be switched onto a
motor which is still spinning by rapidly changing the output frequency of the converter until
the actual motor speed has been found. Then, the motor runs up to setpoint using the
normal ramp time.
Flying start must be used in cases where the motor may still be turning (e.g. after a short
mains break) or can be driven by the load. Otherwise, overcurrent trips will occur.
Setting parameters
P1200 Flying start Settings 1 to 3 search in both directions:
= 0: Flying start disabled
= 1: Flying start always active
= 2: Flying start active after power on, fault, OFF2
= 3: Flying start active after fault, OFF2
Settings 4 to 6 search only in the direction of the setpoint:
= 4: Flying start always active
= 5: Flying start active after power on, fault, OFF2
= 6: Flying start active after fault, OFF2
P1202[0...2] Motor-current: flying start [%] This parameter defines search current used for flying start.
Range: 10 to 200 (factory default: 100)
Search current settings in P1202 that are below 30% (and sometimes
other settings in P1202 and P1203) may cause motor speed to be found
prematurely or too late, which can result in F1 or F2 trips.
P1203[0...2] Search rate: flying start [%] This parameter sets factor (in V/f mode only) by which the output frequency
changes during flying start to synchronize with turning motor.
Range: 10 to 500 (factory default: 100)
A higher value produces a flatter gradient and thus a longer search
time. A lower value has the opposite effect.

 Loading...
Loading...










