Commissioning via the built-in BOP
5.6 Function commissioning
SINAMICS V20 Converter
92 Operating Instructions, 10/2019, A5E34559884-012
5.6.2.4 Setting the PID controller
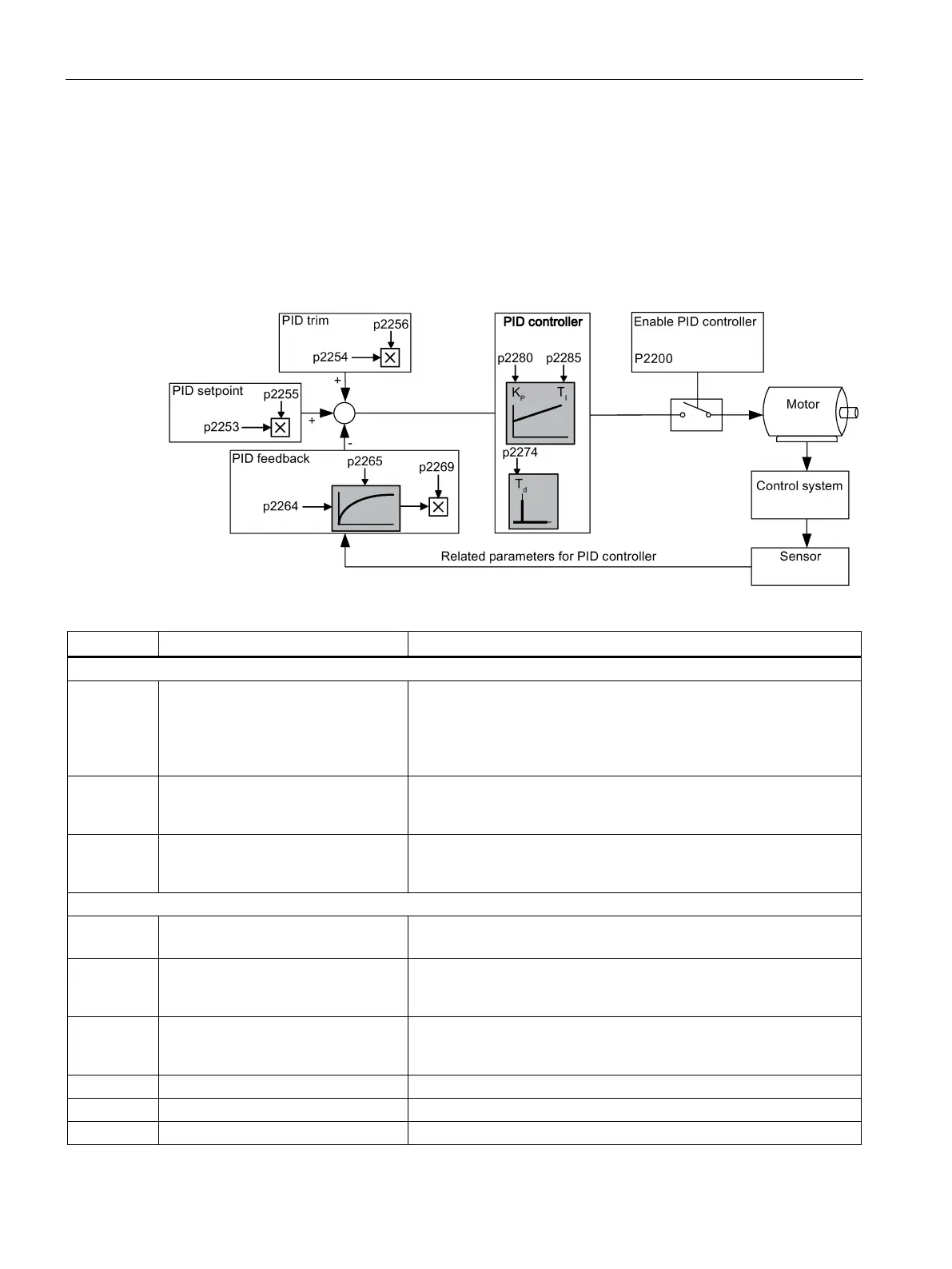
Functionality
The integrated PID controller (technology controller) supports all kinds of simple process
control tasks, e.g. controlling pressures, levels, or flowrates. The PID controller specifies the
speed setpoint of the motor in such a way that the process variable to be controlled
corresponds to its setpoint.
Setting parameters
P2200[0...2] BI: Enable PID controller
This parameter allows user to enable/disable the PID controller.
Setting to 1 enables the PID closed-loop controller.
Setting 1 automatically disables normal ramp times set in P1120 and
P1121 and the normal frequency setpoints.
P2235[0...2] BI: Enable PID-MOP (UP-cmd)
This parameter defines source of UP command.
Possible sources: 19.13 (BOP), 722.x (Digital Input), 2036.13 (USS
P2236[0...2] BI: Enable PID-MOP (DOWN-cmd)
This parameter defines source of DOWN command.
Possible sources: 19.14 (BOP), 722.x (Digital Input), 2036.14 (USS
Additional commissioning parameters
P2251 PID mode = 0: PID as setpoint (factory default)
P2253[0...2] CI: PID setpoint
This parameter defines setpoint source for PID setpoint input.
Possible sources: 755[0] (Analog input 1), 2018.1 (USS PZD 2),
2224 (Actual fixed PID setpoint), 2250 (Output setpoint of PID-MOP)
P2254[0...2] CI: PID trim source This parameter selects trim source for PID setpoint.
Possible sources: 755[0] (Analog input 1), 2018.1 (USS PZD 2),
2224 (Actual fixed PID setpoint), 2250 (Output setpoint of PID-MOP)
Range: 0.00 to 100.00 (factory default: 100.00)
Range: 0.00 to 100.00 (factory default: 100.00)
Ramp-up time for PID setpoint [s]
Range: 0.00 to 650.00 (factory default: 1.00)

 Loading...
Loading...










