Furthermore, on confirmation the changes are automatically saved as part of the current robot
installation. See1.23.5. Installation → Load/Saveon page126 for further information on saving
the robot installation.
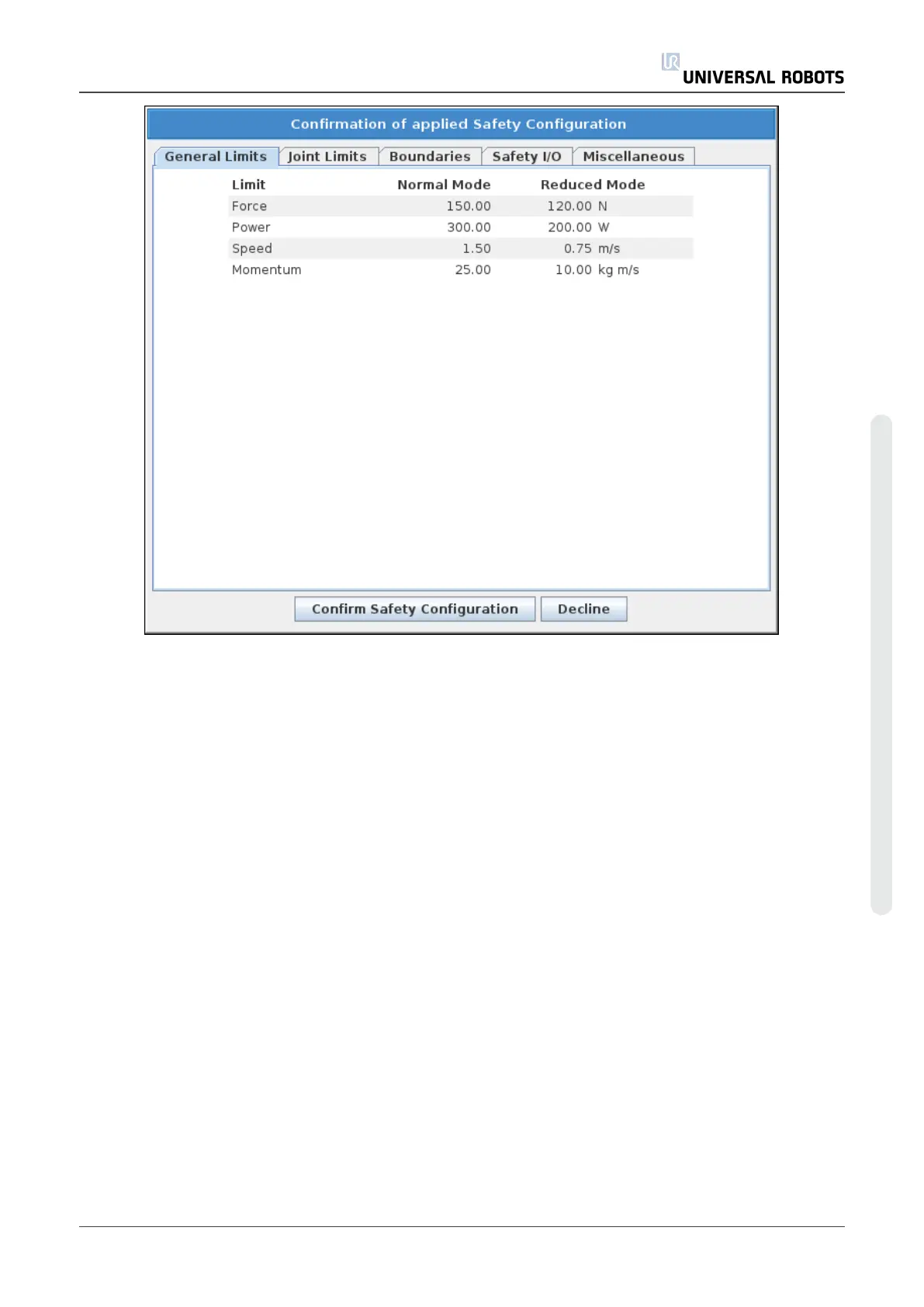
1.20.10. General Limits
The general safety limits serve to limit the linear speed of the robot TCP as well as the force it
may exert on the environment. They are composed of the following values:
Force
A limit for the maximum force that the robot TCP exerts on the environment.
Power
A limit for the maximum mechanical work produced by the robot on the environment,
considering that the payload is part of the robot and not of the environment.
Speed
A limit for the maximum linear speed of the robot TCP.
Momentum
A limit for the maximum momentum of the robot arm.
There are two means available for configuring the general safety limits within the installation;
Basic Settings and Advanced Settings which are described more fully below.
User Manual 93 UR10
Copyright © 2009–2020 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...






