Starting a Default Program
The default program is auto started in the Run Program screen. When the default program is
loaded and the specified external input signal edge transition is detected, the program is started
automatically.
On Startup, the current input signal level is undefined. Choosing a transition that matches the
signal level on startup starts the program immediately. Furthermore, leaving the Run Program
screen or tapping the Stop button in the Dashboard disables the auto start feature until the Run
button is pressed again.
Auto Initialization
The Robot arm is automatically initialized. On the specified external input signal edge transition,
the Robot arm is completely initialized, regardless of the visible screen.
Brake Release is the final initialization stage. During Brake Release, the Robot arm makes a
minor movement and a clicking noise. Furthermore, the brakes cannot be automatically released
if the configured mounting does not match the mounting detected (based on sensor data). In this
case, the robot must be initialized manually on the initialization screen (see1.21.6. Initialization
Screenon page114).
On Startup, the current input signal level is undefined. Choosing a transition that matches the
signal level on startup initializes the Robot arm immediately.
The auto initialization feature works when only the Robot arm is powered off.
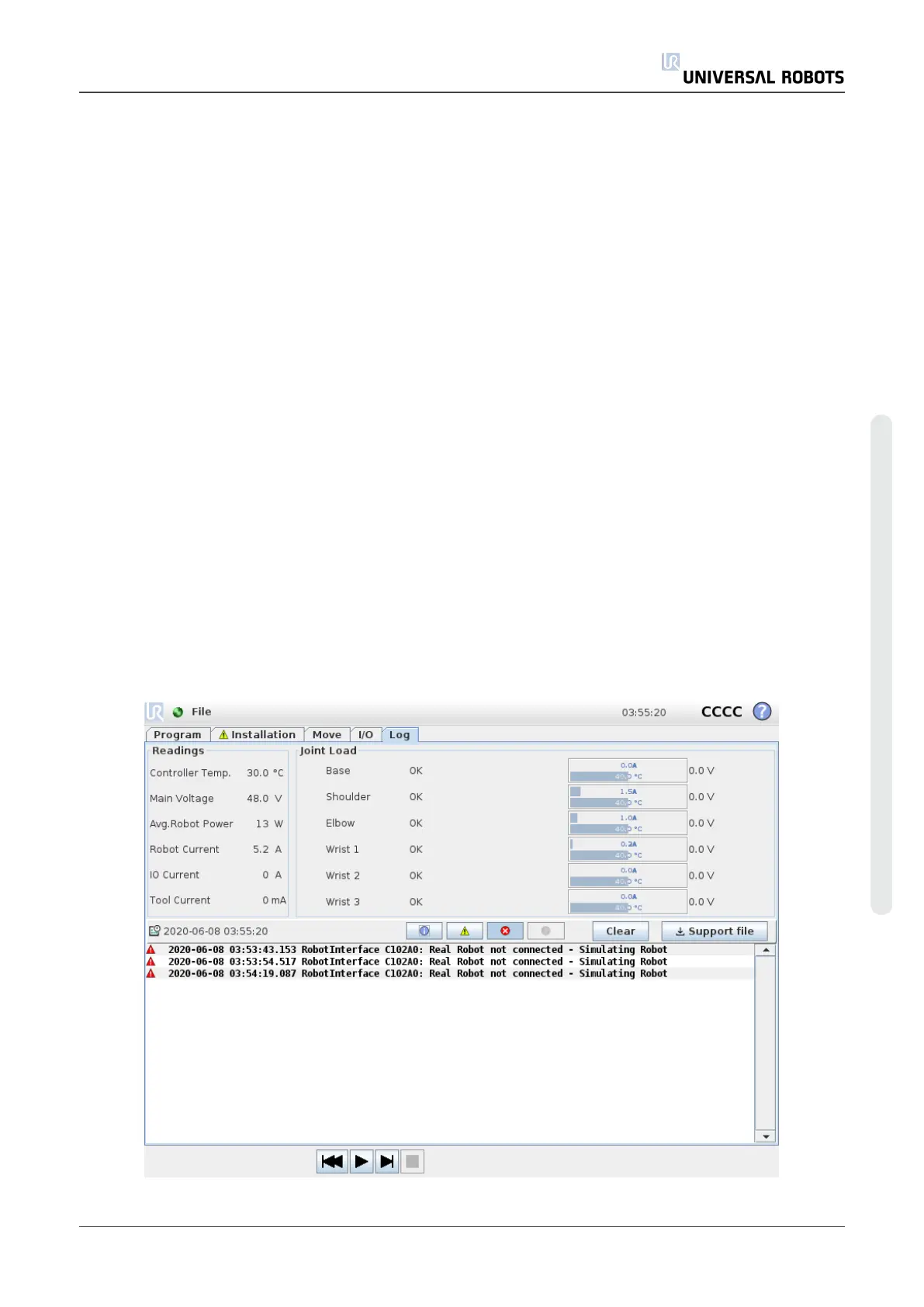
1.23.16. Log Tab
User Manual 151 UR10
Copyright © 2009–2020 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...






