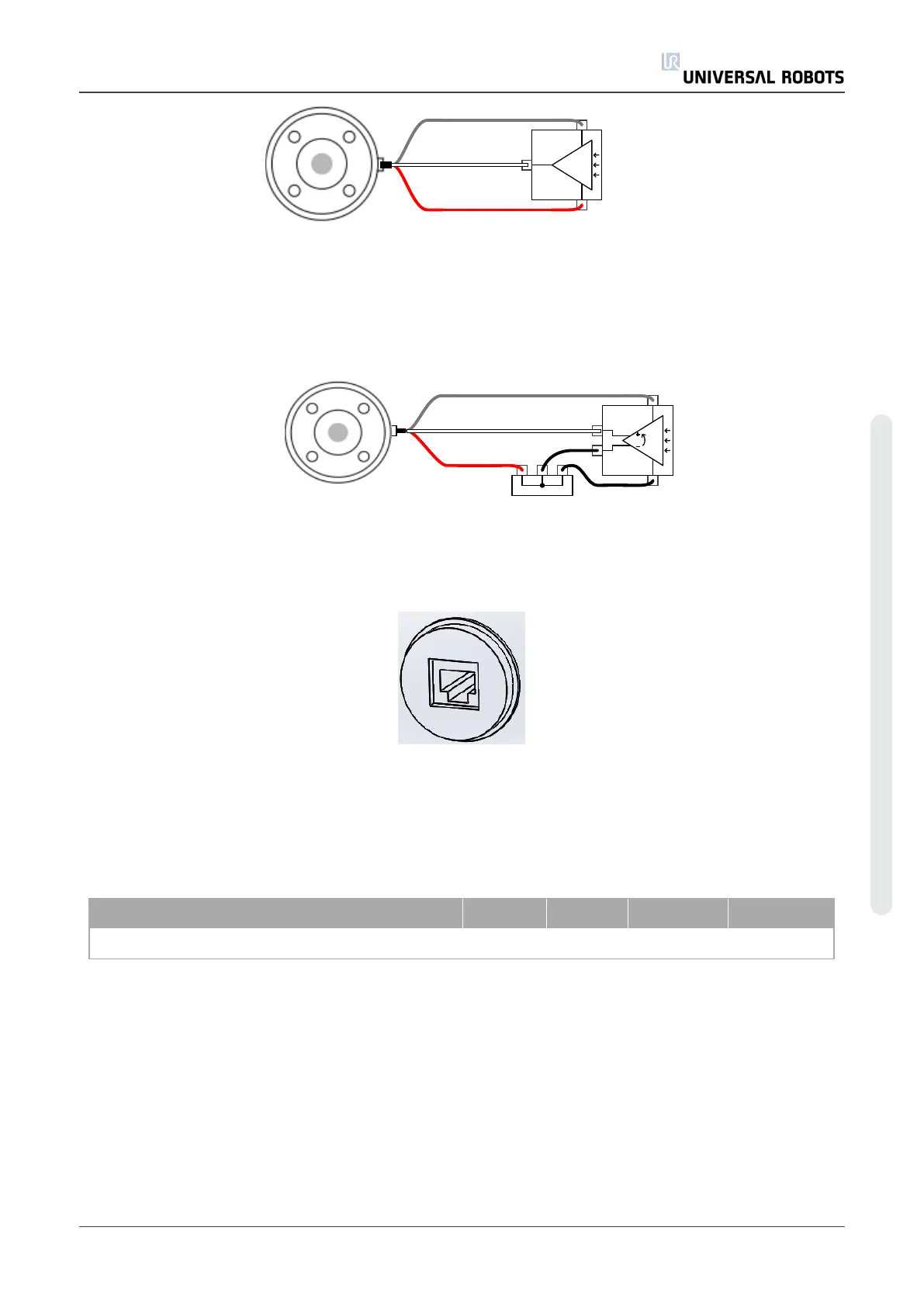
Using the Tool Analog Inputs, Differential
The example below shows how to connect an analog sensor with a differential output. Connect
the negative output part to GND (0V) and it works in the same way as a non-differential sensor.
1.9.5. Ethernet
An Ethernet connection is provided at the bottom of the control box, see illustration below.
The Ethernet interface can be used for the following:
• MODBUS I/O expansion modules. See more in partPart II PolyScope Manualon page85.
• Remote access and control.
The electrical specifications are shown below.
Parameter Min Typ Max Unit
Communication speed 10 - 1000 Mb/s
1.9.6. Mains connection
The mains cable from the controller box has a standard IEC plug in the end. Connect a country
specific mains plug or cable to the IEC plug.
In order to energize the robot, the control box must be connected to the mains. This must be
done through the standard IEC C20 plug at the bottom of the control box through a corresponding
IEC C19 cord, see illustration below.
User Manual 45 UR10
Copyright © 2009–2020 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...






