1.24.6. Command: Relative Waypoint
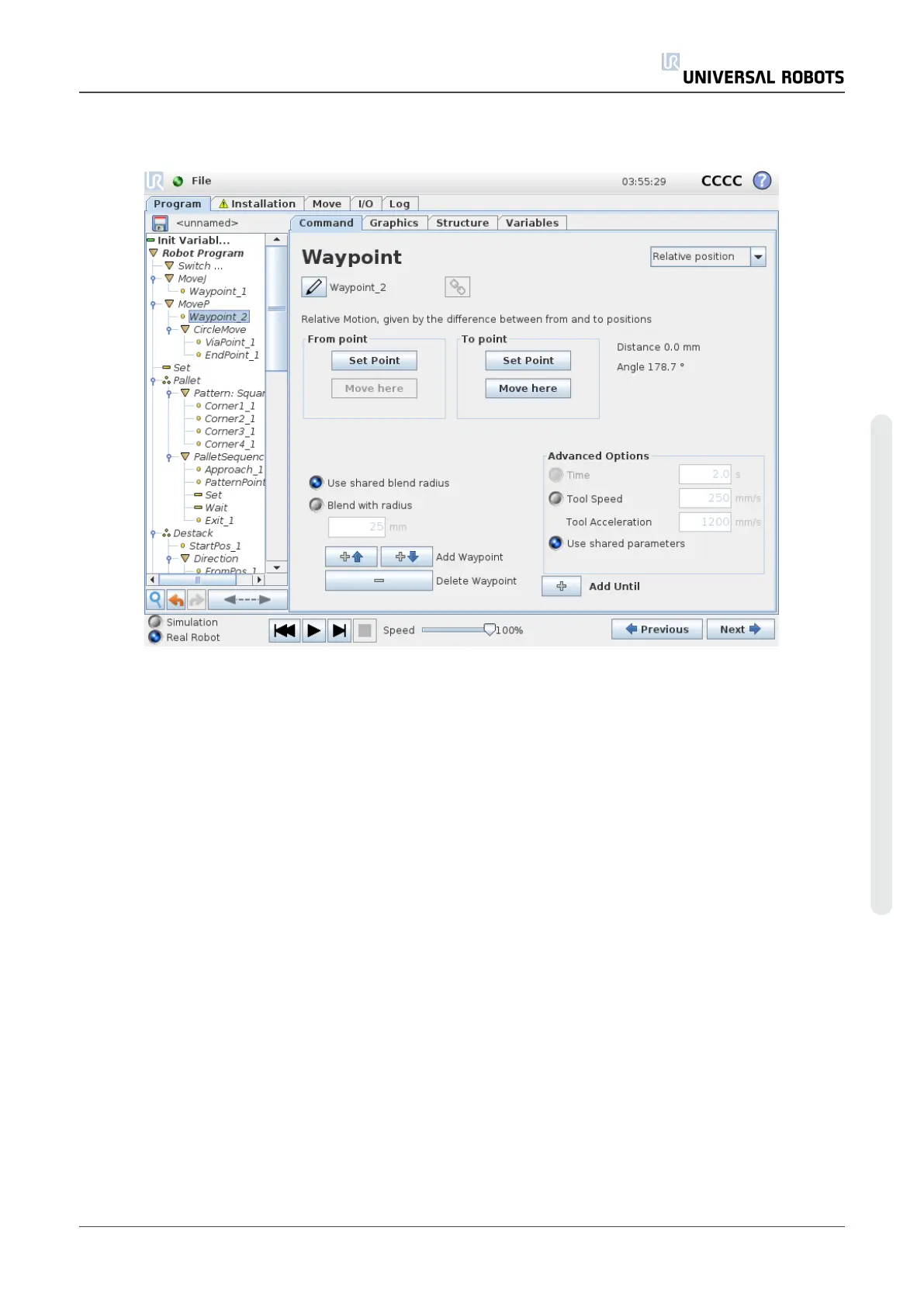
A waypoint with the position given relative to the robot arm’s previous position, such as “two
centimeters to the left”. The relative position is defined as the difference between the two given
positions (left to right).
Note: repeated relative positions can move the robot arm out of its workspace.
The distance here is the Cartesian distance between the TCP in the two positions. The angle
states how much the TCP orientation changes between the two positions. More precisely, the
length of the rotation vector describing the change in orientation.
User Manual 171 UR10
Copyright © 2009–2020 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...






