Defining the general safety limits only defines the limits for the tool, and not the overall limits of
the robot arm. This means that although a speed limit is specified, it does not guarantee that
other parts of the robot arm will obey this same limitation.
When in Freedrive mode (seeFreedriveon page122), and the current speed of the robot TCP is
close to the Speed limit, the user will feel a repelling force which increases in magnitude the
closer the speed comes to the limit. The force is generated when the current speed is within
approximately 250mm/s of the limit.
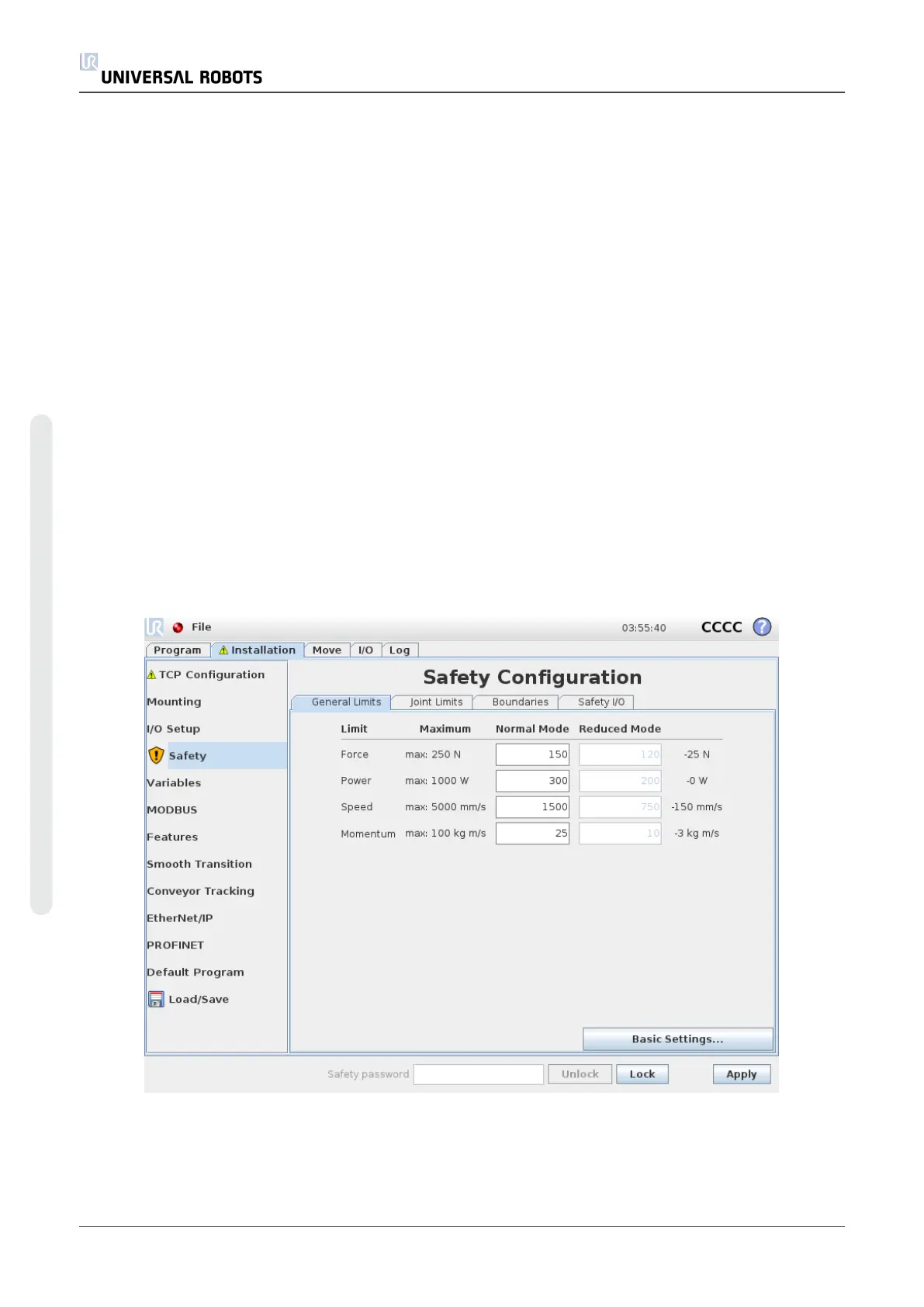
Basic Settings
The initial general limits subpanel, shown as the default screen, features a slider with four
predefined sets of values for force, power, speed, and momentum limits in both Normal and
Reduced mode.
The specific sets of values are shown in the GUI. Predefined sets of values are suggestions only
and shall not substitute a proper risk assessment.
Switching to Advanced Settings
Should none of the predefined sets of values be satisfactory, the Advanced Settings...
button can be pressed to enter the advanced general limits screen.
Advanced Settings
UR10 94 User Manual
Copyright © 2009–2020 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...






