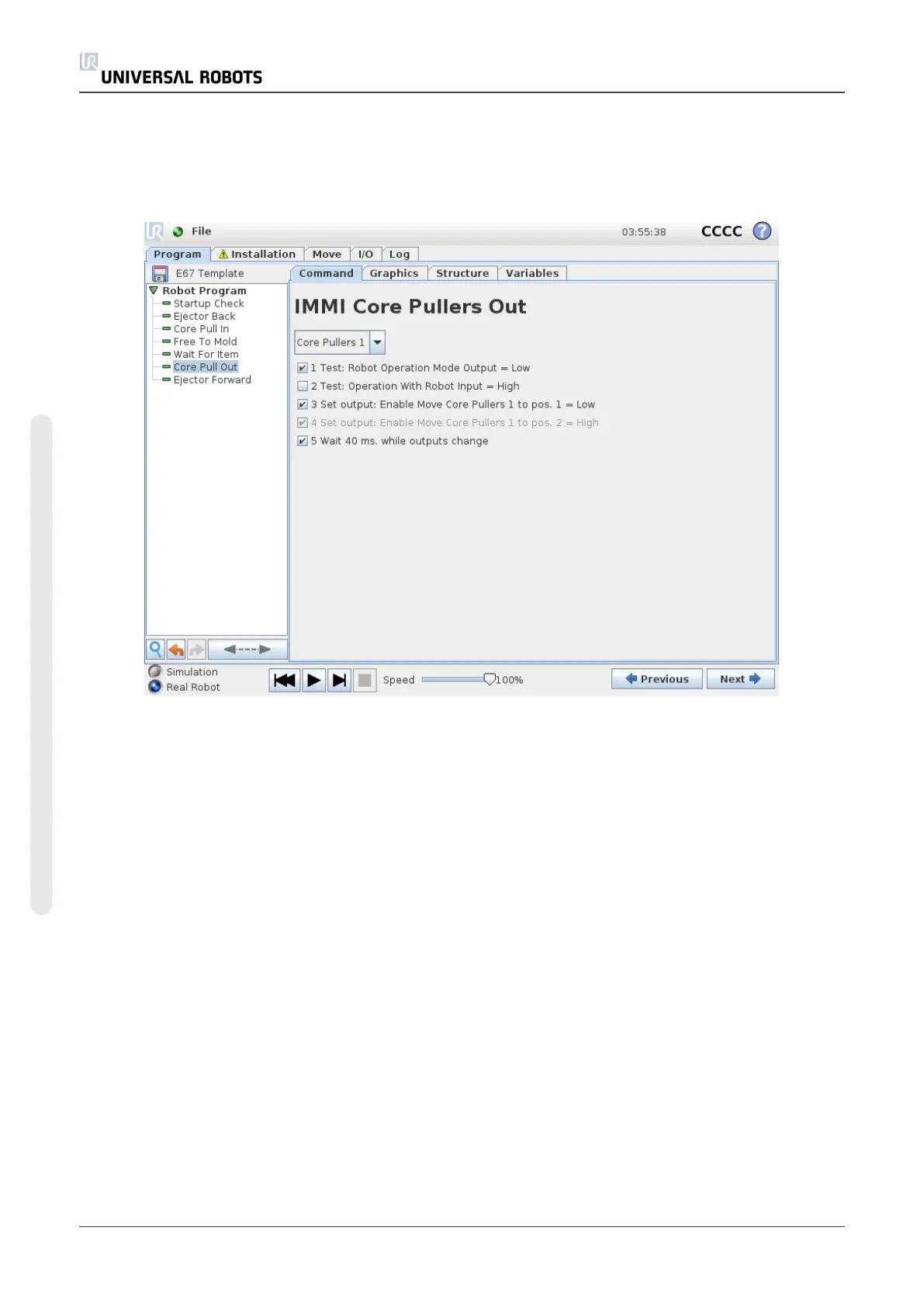
Core Pullers Out
Enables the movement of the core pullers to position 2. Which core pullers are used is selected
from the drop down menu. Use the checkboxes to enable/disable individual steps.
1.28.4. I/O action and wait
As the robot digital outputs can be set by an Action node, so can also the EUROMAP 67 output
signals. When the EUROMAP 67 interface is installed, the signals appear in the menues where
they can be selected. Also, as the robot digital inputs, EUROMAP 67 input signals can be used to
control the program behavior by inserting a Wait node, which makes the program wait until an
input is either high or low.
For advanced users, an output can be set to the value of a specified expression. Such expression
may contain both inputs, outputs, variables, etc., and can be used to obtain complex program
functionality. Likewise, a Wait node can be set to wait until the value of an expression is true.
Generally, the EUROMAP 67 signals will all be available on the expression screen, which means
that they can be used in all circumstances where an expression can be selected.
In order to use signals, which are not part of the EUROMAP 67 program structures, they must be
either set or read ,,manually” from a program, by inserting additional Action, Wait, etc. nodes.
This applies to e.g. the manufacturer dependent and the reserved signals, which are all usable
although not shown on the EUROMAP 67 I/O tab. This also means that in order to make use of
the inputs Reject and Intermediate Mould Opening Position, the template program will have to be
customized and extended.
UR10 230 User Manual
EUROMAP 67 Interface
Copyright © 2009–2020 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...






