1.28.3. Program structure functionality
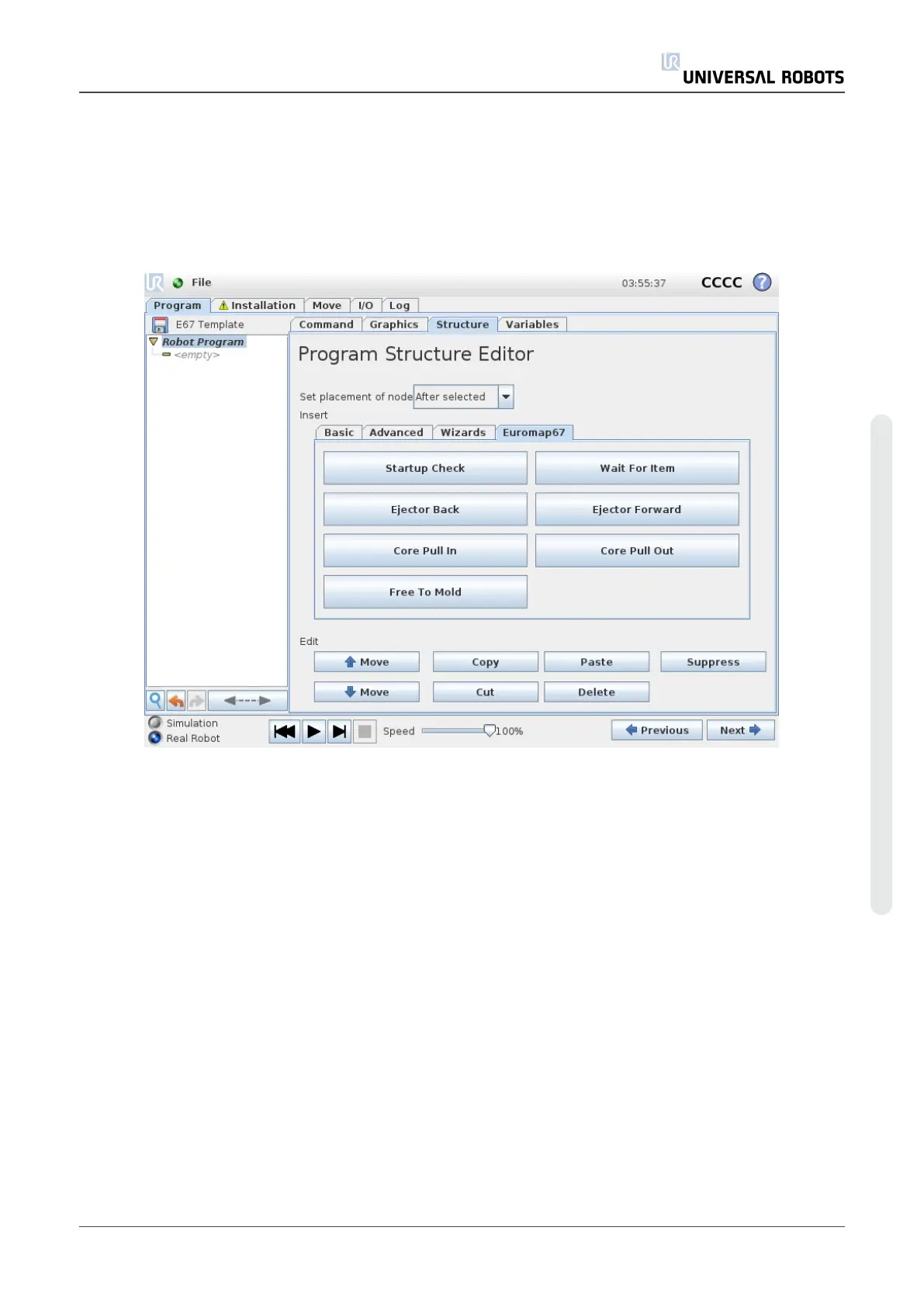
There are seven program structures, which can be selected from the Structure tab on the
program screen. These structures will be available after the eurompa67 interface has been
properly installed (as explained in1.29. Installing and uninstalling the interfaceon page231). An
example of their use, can be seen in the EUROMAP 67 program template.
The structures are all made to achieve a proper and safe interaction with the IMM, and therefore
they all include tests that certain signals are set correctly. Also, they may set more than one
output to enable only one action.
When a program structure is inserted into a robot program, it can be customized by selecting the
structure in the program, and then clicking on the Command tab. All program structures consist
of a number of steps. Most of the steps are enabled per default, and some cannot be disabled
because they are essential to the structure intention. The Test steps make the program stop if
the test condition is not met. Both the state of inputs and outputs are testable. Set output steps
set a specified output to either high or low. Wait until steps are typically used for waiting until a
movement has been finished before continuing with further steps and following program nodes.
User Manual 223 UR10
EUROMAP 67 Interface
Copyright © 2009–2020 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...






