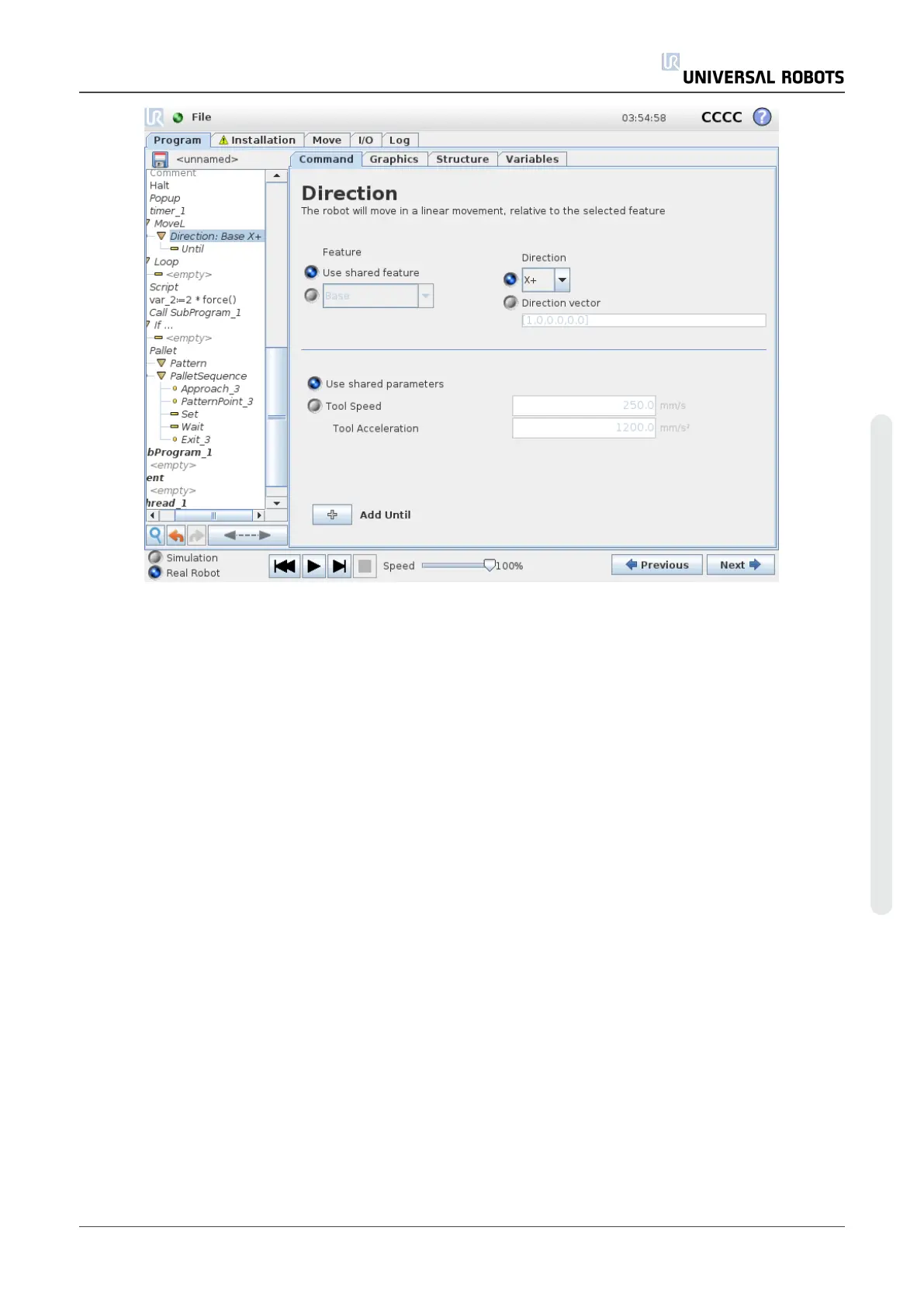
Stopping a Direction Movement
You can add Direction Vector settings, for Tool Speed and Tool Acceleration, to define the vector
direction for linear motion, allowing for advanced uses as:
• defining linear motion relative to multiple feature axes
• computing the direction as a mathematical expression
The Direction Vectors defines a custom code expression that is resolved to a unit vector. For
example, for a vector of [2,1,0] the robot moves two units in the x direction for every unit in the y
direction, relative to the specified speed.
1.24.9. Command: Until
The program node Until defines a stop criterion for a motion. The robot moves along a path and
stops when contact is detected.
User Manual 173 UR10
Copyright © 2009–2020 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...






