1.8. Mechanical Interface
1.8.1. Introduction
This chapter describes the basics of mounting the various parts of the robot system. Electrical
installation instructions in chapter1.9. Electrical Interface on page29 must be observed.
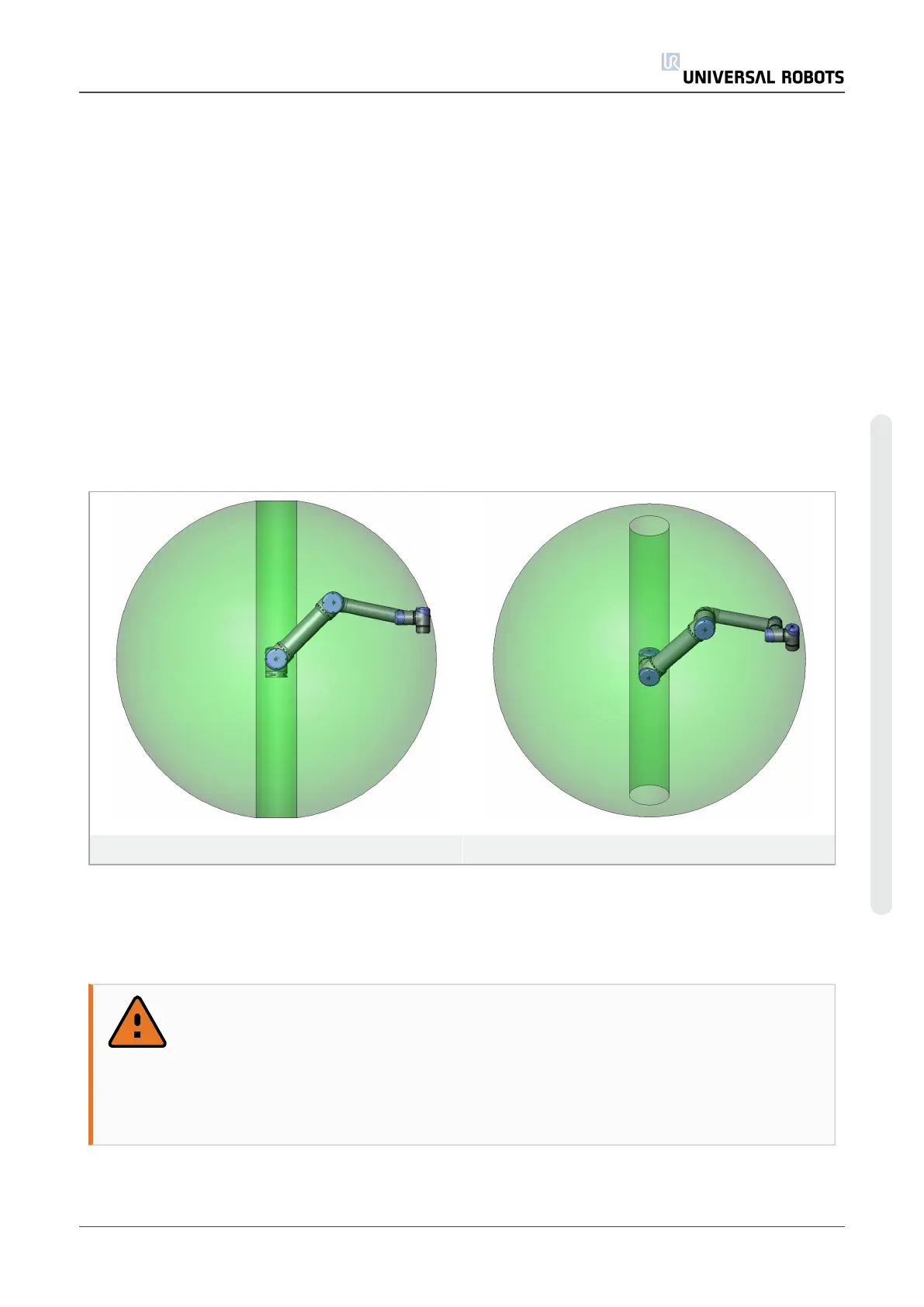
1.8.2. Workspace of the Robot
The workspace of the robot extends 1300mm from the base joint. It is important to consider the
cylindrical volume directly above and directly below the robot base when a mounting place for
the robot is chosen. Moving the tool close to the cylindrical volume should be avoided if possible,
because it causes the joints to move fast even though the tool is moving slowly, causing the
robot to work inefficiently and making it difficult to conduct a risk assessment.
Front Tilted
1.8.3. Mounting
Robot Arm
WARNING
• Make sure the robot arm is properly and securely bolted in place. The
mounting surface shall be sturdy.
• Remember to insert the rubber plugs in all mounting holes in the robot base
to avoid entrapment of fingers.
User Manual 23 UR10
Copyright © 2009–2020 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...






