8 Application Instructions API 100-149
DVP-PLC Application Manual
8-27
API
Mnemonic Operands Function
117
D DEG P
Radian Angle
Controllers
ES/EX/SS SA/SX/SC EH/SV
Bit Devices Word Devices Program Steps Type
OP
X Y M S K H KnX KnY KnM KnS T C D E F
S * * *
D *
DDEG, DDEGP: 9 steps
PULSE 16-bit 32-bit
ES EX SS SA SX SC EH SV ES EX SS SA SX SC EH SV ES EX SS SA SX SC EH SV
Operands:
S: Source (radian) D: Result (angle)
Explanations:
1. See the specifications of each model for their range of use.
2. Flags: M1020 (zero flag); M1021 (borrow flag); M1022 (carry flag)
3. Degree = radian × (180/
π)
4. If the absolute value of the result > maximum floating point available, the carry flag M1022 = On.
5. If the absolute value of the result < minimum floating point available, the borrow flag M1021 = On.
6. If the result = 0, the zero flag M1020 = On.
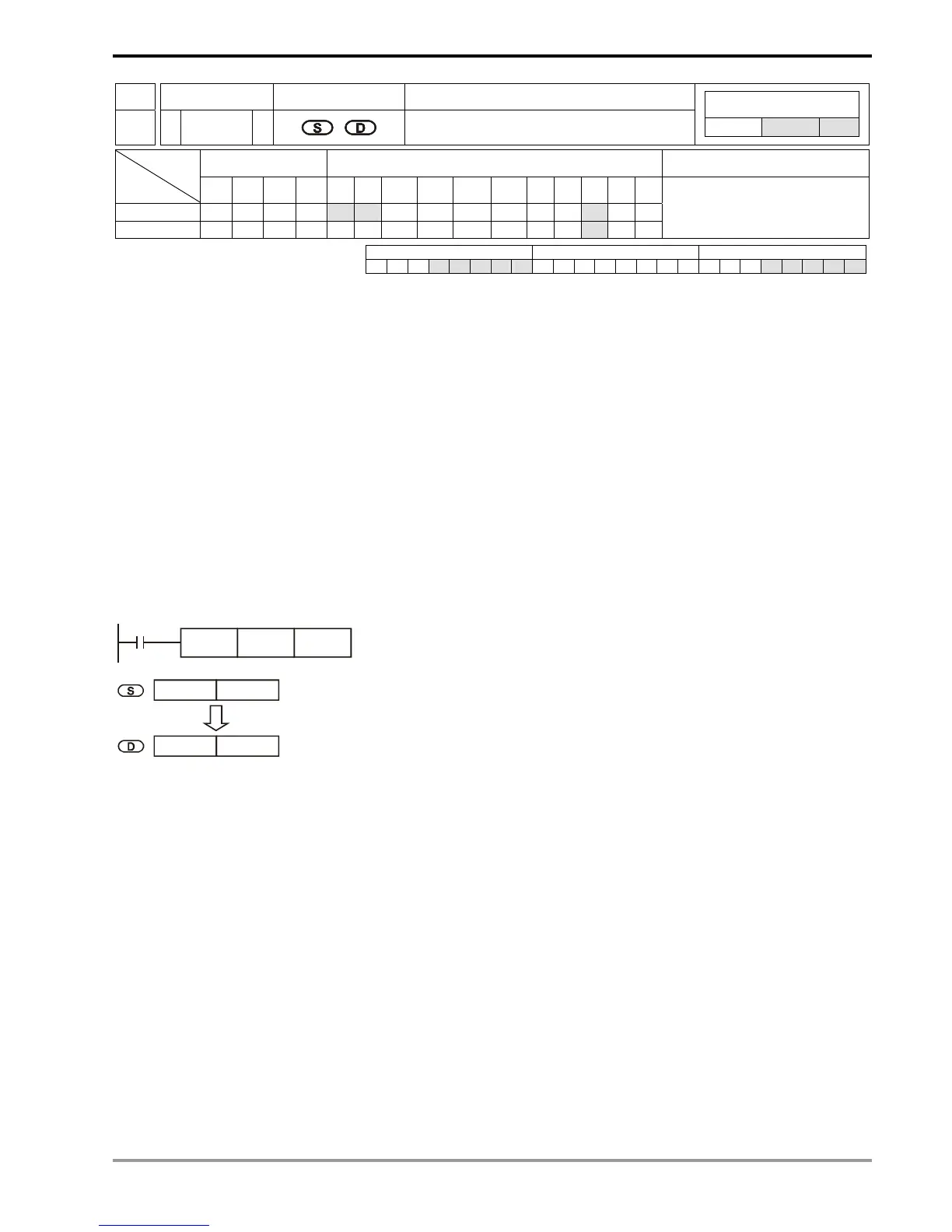
Program Example:
When X0 = On, designate the angle of binary floating point (D1, D0). Convert the radian into angle and store the
result in binary floating point in (D11, D10).
X0
DDEG D0 D10
D 1 D 0
D 11 D 10
binary floating point
Angle (radian 180/ )
X
π
Radian
binary floating point
Remarks:
For floating point operations, see “5.3 Handling of Numeric Values”.