1 Program Structure of DVP-PM
DVP-PM Application Manual
1-4
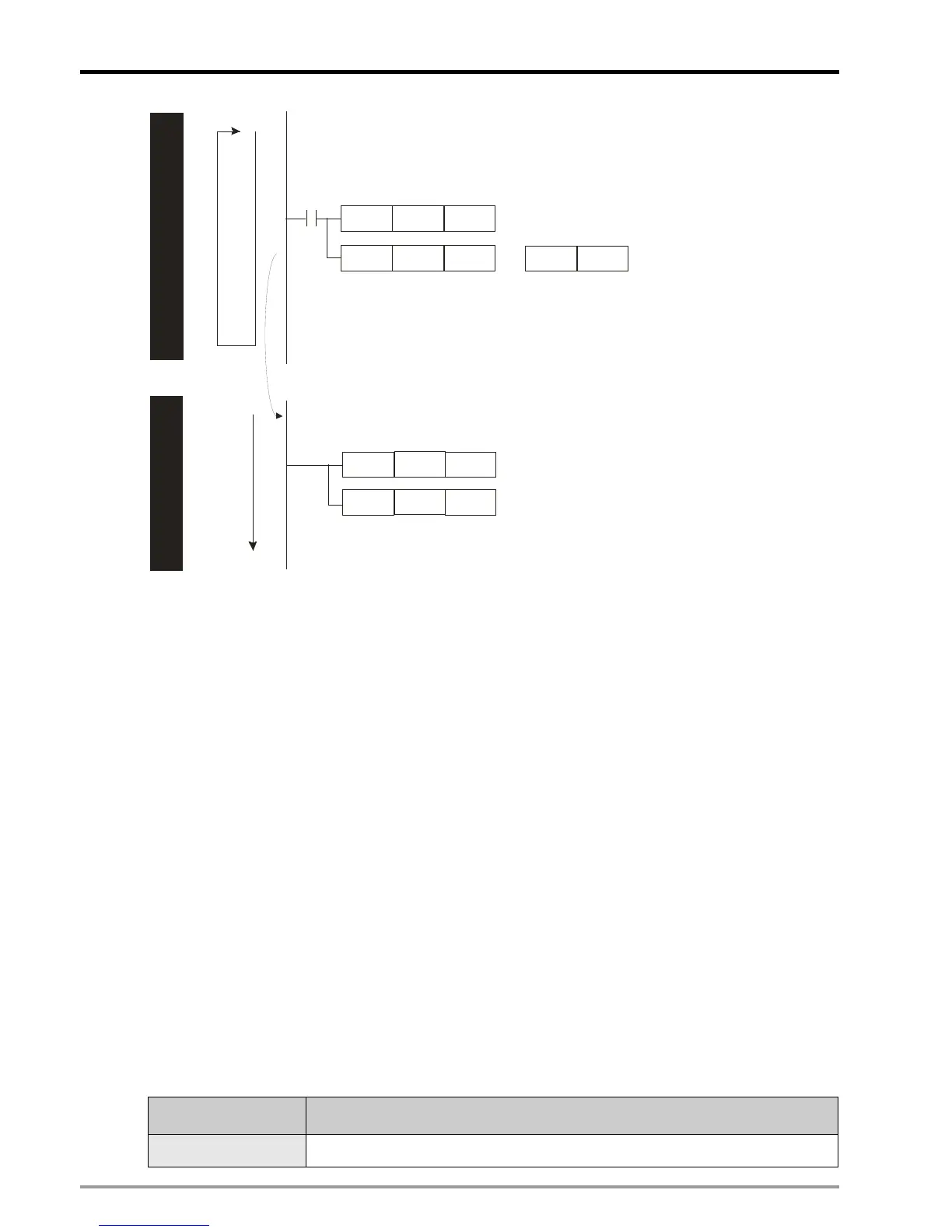
MOV
.
.
.
.
.
.
.
.
.
H800A
D1868
OUT
M1074
X0
X0 = ON
Set No. of OX as O 10. b15=1
enables OX subroutine.
X
Set M1074 = ON or D1846_b12 = 1 to run O 10 motion
subroutine
X
C
y
c
l
i
c
s
c
a
n
E
x
e
c
u
t
e
o
n
c
e
O
1
0
0
M
a
i
n
c
o
n
t
r
o
l
p
r
o
g
r
a
m
s
e
c
t
i
o
n
O
X
1
0
M
o
t
i
o
n
s
u
b
r
o
u
t
i
n
g
s
e
c
t
i
o
n
MOVP
K100
D1836
MOVP
K100
D1837
.
.
.
MOV
H1000
D1846
Or
When X0 = On, OX10 motion subroutine will execute once and stop when the execution reaches M2. If you
need to execute it again, activate X0 again and OX10 subroutine will be executed again.
3. There are four ways to stop OX motion subroutine:
z When DVP-PM is powered, and the AUTO/MANU switch goes from AUTO to MANU, M1072 will be
OFF automatically. O100 main program will be in STOP status. The operation of OX motion
subroutines will stop at this moment.
z You can also stop OX subroutine by controlling the input signals of the external terminal (STOP0).
z When DVP-PM is powered, you can also stop OX subroutine through communication by setting
M1074 to be OFF or D1846 as 0.
z When errors occur during compiling or operation of the program, OX subroutines will stop
automatically. See Chapter 11 Index for the table of the error codes and their causes.
4. OX motion subroutines support basic instructions, application instructions (API), motion instructions (MON)
and G-Code instructions. Therefore, you can design your own motion program by using these instructions
and setting up X-Y-Z axis parameters for your desired X-Y-Z motion control.
y The instructions mentioned above shall be designed in OX0 ~ OX99 motion subroutines.
y OX motion subroutine is able to call Pn subroutines. See 1.3 for more details.
5. The above explanations are sorted in the table below:
OX motion subroutine Explanation
Start of OX
OXn, pointer indicates the start of OX subroutine. OX0 ~ OX99, 100 motion subroutines

 Loading...
Loading...










