Firmware 03.00 - DMS EN 5.0 - 07/2009 L 157
8400 BaseLine D | Software Manual
Function library
Function blocks
9.1.3.1 Control characteristic
The PID algorithm is active in the Lenze setting.
Differential component Kd
The Kd component can be deactivated by setting nKd = 0.0. This makes the controller a PI
controller (or P controller if the integral action component is switched off as well).
Integral action component
You can switch off the I-component by
setting bIOff to TRUE or
entering Tn = 6000 s (max. value).
The I-component can be switched on and off online.
Reset time Tn
nTn serves to parameterise the reset time.
Gain Vp
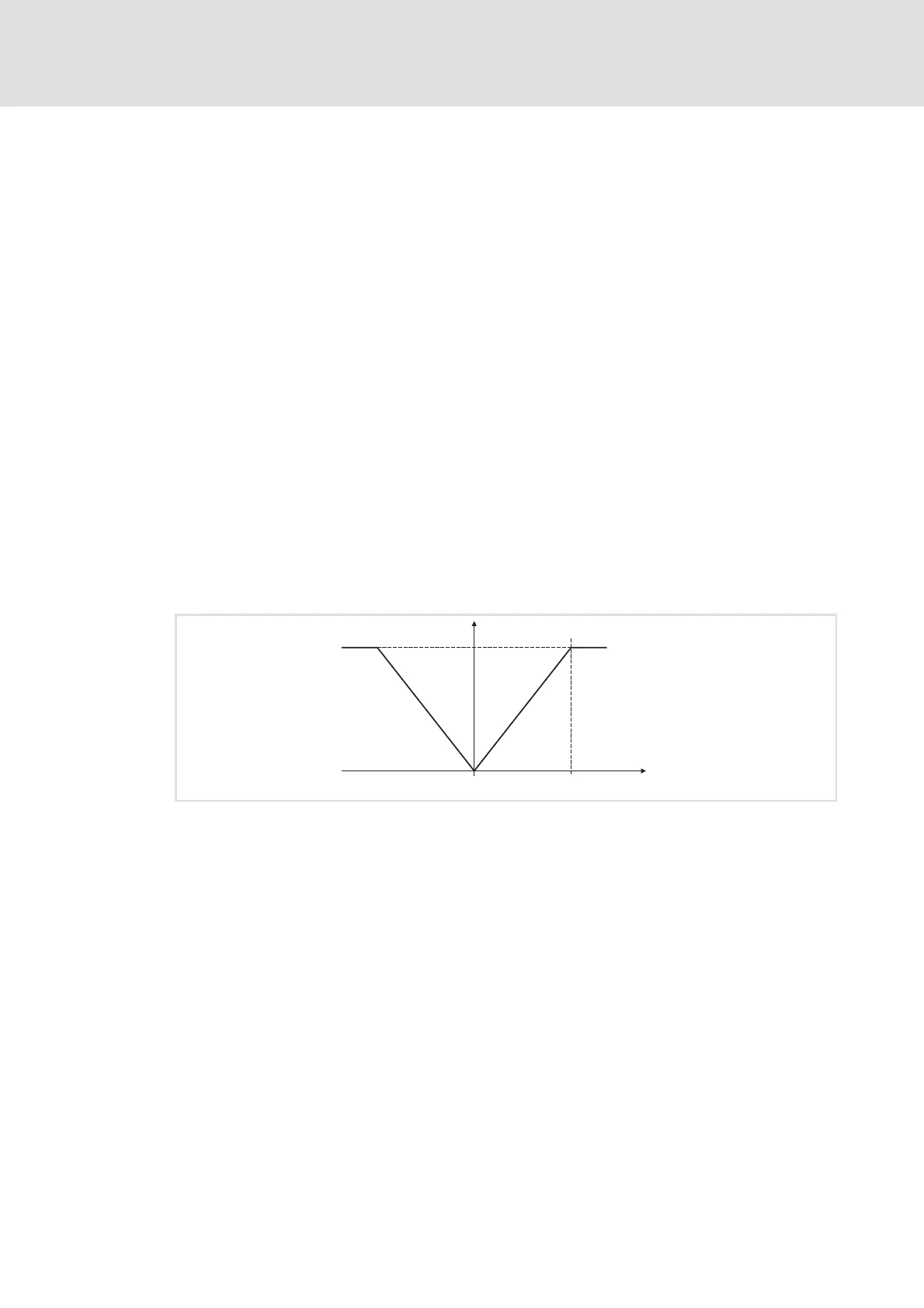
The Vp gain is defined via nAdapt_a:
[9.4] Definition of Vp gain via nAdapt_a
The input value is led via a linear characteristic. The slope of the characteristic is defined
with nVp (upper limit) and the value "0" (lower limit). The value in nVp applies if the
input value is +100 % (100 % = 16384)
Vp
0 100 %
nAdapt_a
nVp
 Loading...
Loading...
