520
Appendix 5.3.2 Replacing programs using multiple CPU
transmission dedicated instructions
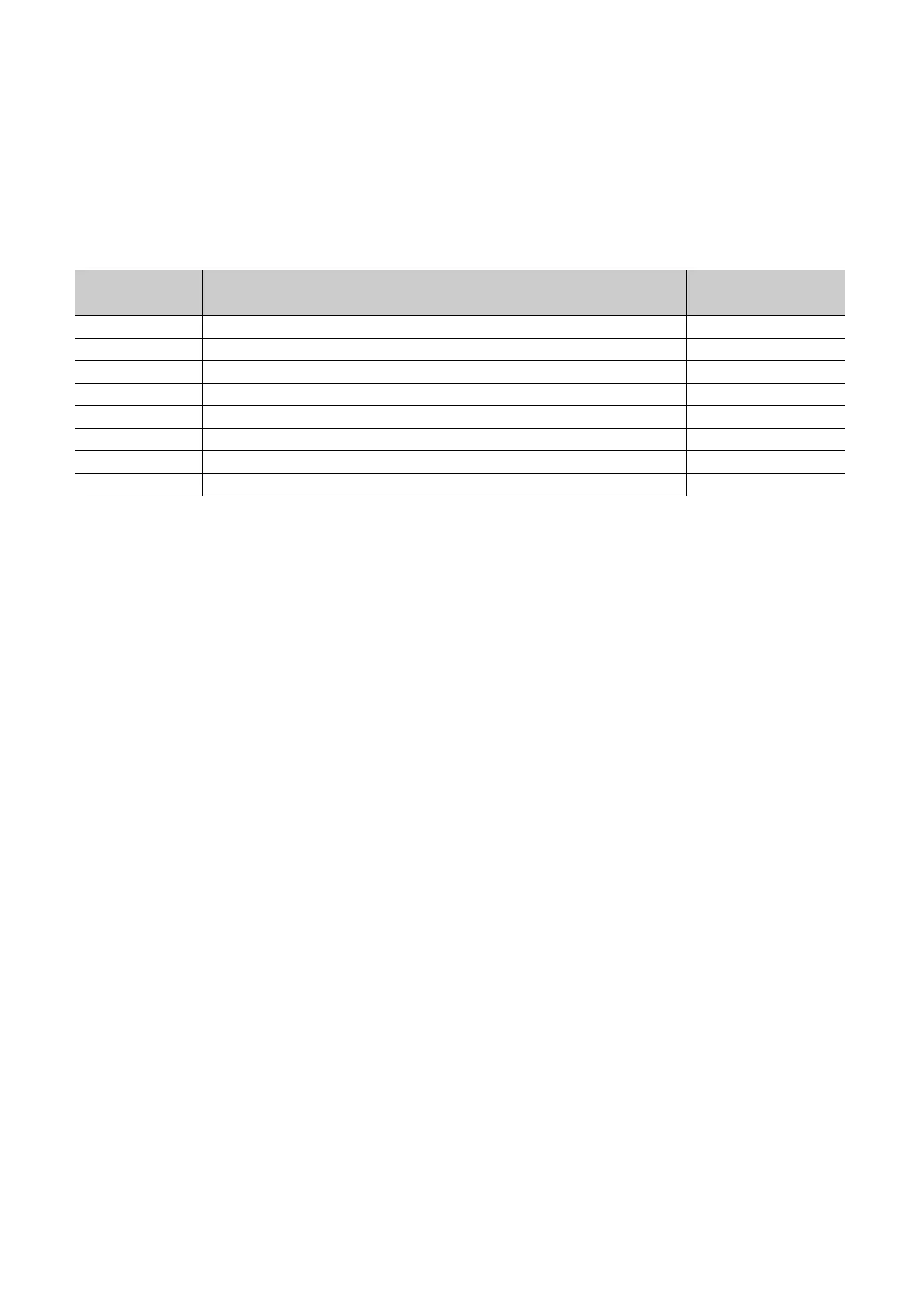
(1) Replacing the module with the QnUD(H)CPU or Built-in Ethernet port QCPU
The following table shows instructions need to be replaced and corresponding alternative instructions. For the
specifications of each instruction, refer to the manuals for the Motion CPU.
(2) Replacing the module with the Q00UCPU, Q01UCPU, or Q02UCPU
The Q00UCPU, Q01UCPU, and Q02UCPU support the same multiple CPU transmission dedicated instructions
used in the Basic model QCPU.
The alternative instructions in the table in (1) are not available for Q00UCPU, Q01UCPU, and Q02UCPU.
Symbol Instruction description
Symbol of alternative
instruction
S(P).DDWR Write other CPU device data into host CPU D(P).DDWR
S(P).DDRD Read other CPU device data into host CPU D(P).DDRD
S(P).SFCS Request of motion SFC program startup D(P).SFCS
S(P).SVST Request of servo program startup D(P).SVST
S(P).CHGA Current value change of halted axis/synchronized encoder/cam axis D(P).CHGA
S(P).CHGV Axis speed change during positioning and JOG operation D(P).CHGV
S(P).CHGT Torque control value change during operation and suspension in real mode D(P).CHGT
S(P).GINT Request of other CPU interrupt program startup D(P).GINT

 Loading...
Loading...






