12 Pulse Outputs
12-38
CP2E CPU Unit Software User’s Manual(W614)
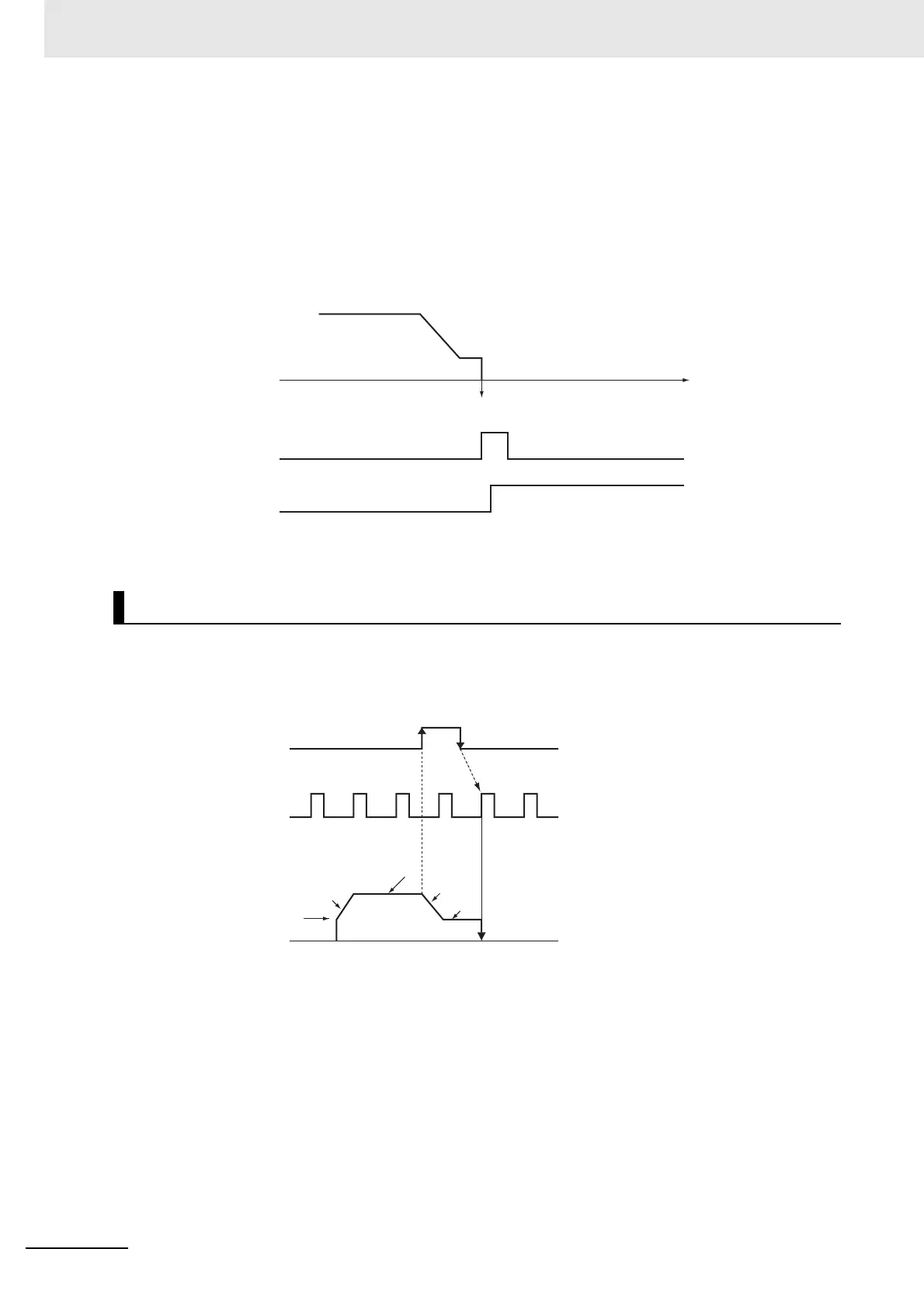
z Operating Mode 2 (with Error Counter Reset Output, with Positioning
Completed Input)
This operating mode is the same as mode 1, except the Positioning Completed Signal (INP) from
the Servo Drive is used. Connect the Positioning Completed Signal from the Servo Drive to a normal
input.
If origin compensation is not being applied, the Positioning Completed Signal is checked after the
Error Counter Reset Output. If origin compensation is being applied, the Positioning Completed Sig-
nal is checked after the compensation operation is completed.
z Origin Detection Method 0: Origin Proximity Input Signal Reversal Required
(Recommended Method)
Origin Detection Method Setting
1
0
1
0
Pulse output
Error Counter
Reset Output
Positioning
Completed Signal
Stop
Time
1
0
1
0
CCW CW
Origin Proximity
Input Signal
Origin Input Signal
Pulse output
Deceleration starts when Origin
Proximity Input Signal turns ON.
After the Origin Proximity Input Signal turns
ON and then OFF, the motor is stopped
when the Origin Input Signal turns ON.
Initial speed
Acceleration
High speed for origin search
Deceleration
Proximity speed for origin search
Start when ORG is executed Stop
 Loading...
Loading...








