4 Repair
4.3.6. Replacement of complete arm system
3HAC026876-001 Revision: C234
© Copyright 2006-2008 ABB. All rights reserved.
4.3.6. Replacement of complete arm system
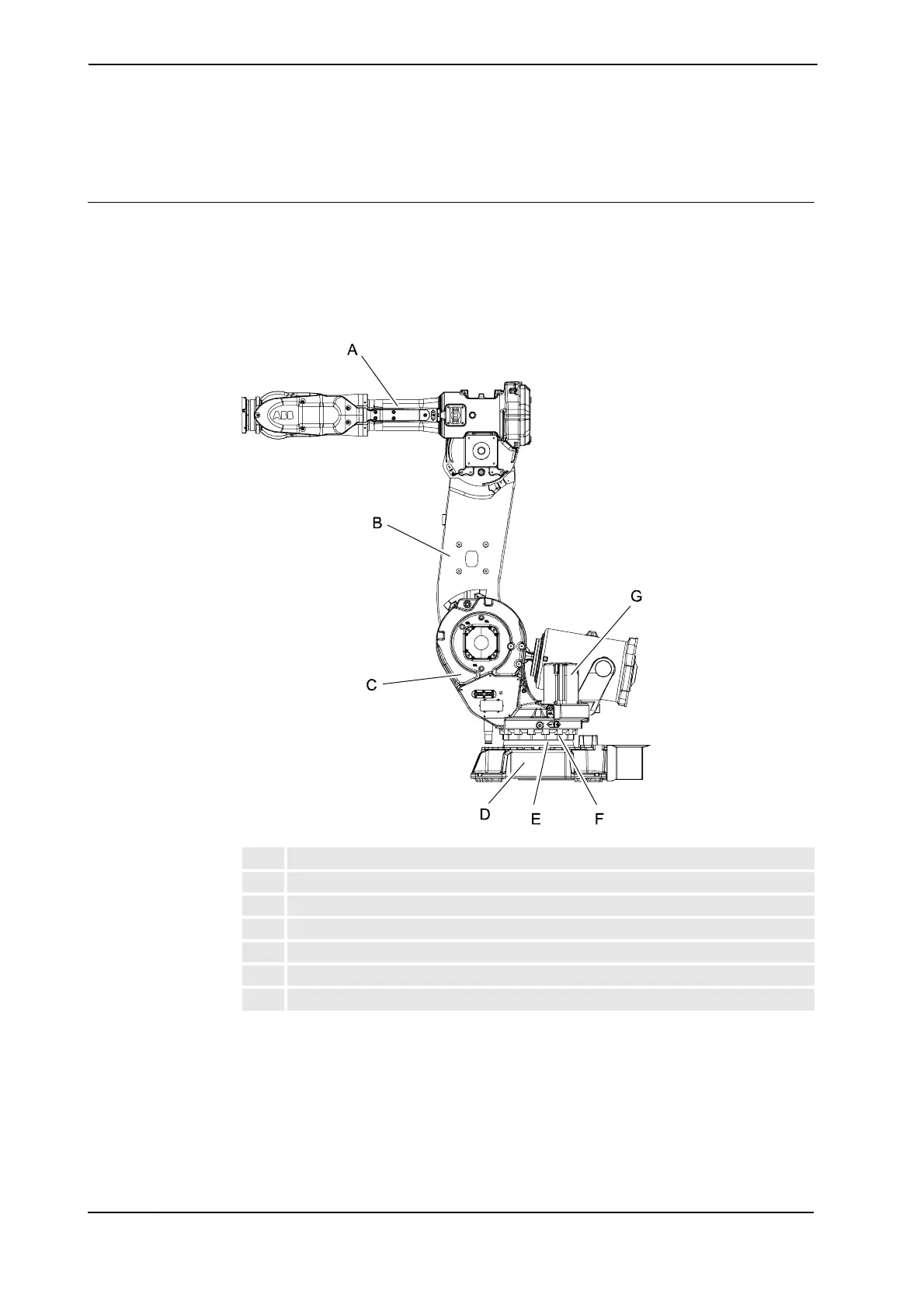
Location of arm system
The complete arm system is defined as the complete robot except for the base and gearbox
axis 1. This is shown in the figure below.
A more detailed view of the component and its position may be found in chapter Upper arm
including wrist unit, motors ax. 3- 6 (IRB 6640 and IRB 6640ID) on page 409 .
Detailed in section Lower arm to upper arm on page 407.
xx0700000352
A Upper arm
B Lower arm
C Frame
D Base
E Gearbox, axis 1
F Attachment screws base M12x80, quality 12.9 Gleitmo (16 pcs)
G Motor, axis 1
Continues on next page
 Loading...
Loading...





