Appendix: Safe Torque Off (STO) 175
Operation of the STO function and diagnostics
If both STO inputs are powered, the STO function is in the standby state and the drive
operates normally. If power is removed from one or both of the STO inputs the STO
function is activated, the drive’s motor output power stage is disabled, and the status
output (page 69) becomes inactive. Starting is possible only after both STO inputs
have been powered, and the fault has been cleared.
The SAFETORQUEOFF Mint keyword reports the status of the STO hardware
registers. SAFETORQUEOFF contains an array of values indicating the states of the
STO1 and STO2 inputs, two internal hardware fault circuits, and one internal STO
status output. This array is described in the following table:
See Safety Manual: Safe Torque Off (STO) function for MicroFlex e150 drives
(LT0313...) for full details.
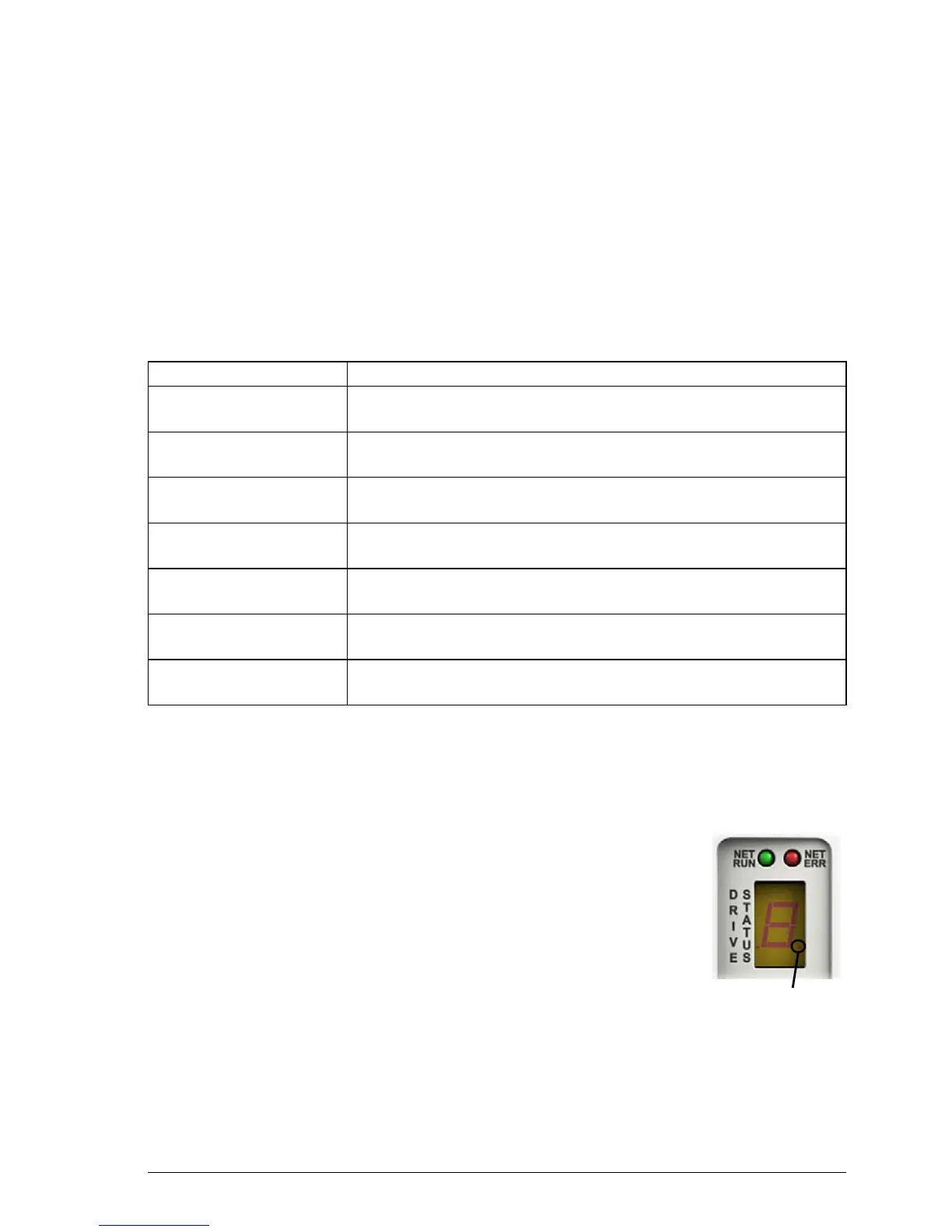
Status display
When an STO error occurs, the drive displays error code 10033,
10034 or 10035 on its front panel Drive Status display. The right
decimal point is always (and only) illuminated for STO errors.
Parameter Meaning
SAFETORQUEOFF(0) The combined state of the two STO inputs:
STO1 = bit 0, STO2 = bit 1
SAFETORQUEOFF(1) The state of STO1 input:
0 = not powered, 1 = powered
SAFETORQUEOFF(2) The state of STO2 input:
0 = not powered, 1 = powered
SAFETORQUEOFF(3) The combined state of the two hardware fault circuits:
STO1 = bit 0, STO2 = bit 1
SAFETORQUEOFF(4) The state of the STO1 internal hardware fault circuit:
0 = no fault, 1 = fault
SAFETORQUEOFF(5) The state of the STO2 internal hardware fault circuit:
0 = no fault, 1 = fault
SAFETORQUEOFF(6) The state of the internal STO status output:
0 = fault, 1 = no fault

 Loading...
Loading...









