Chapter 4 Panel Display and Operation ASDA-A2R Series
4-12 Revision December, 2014
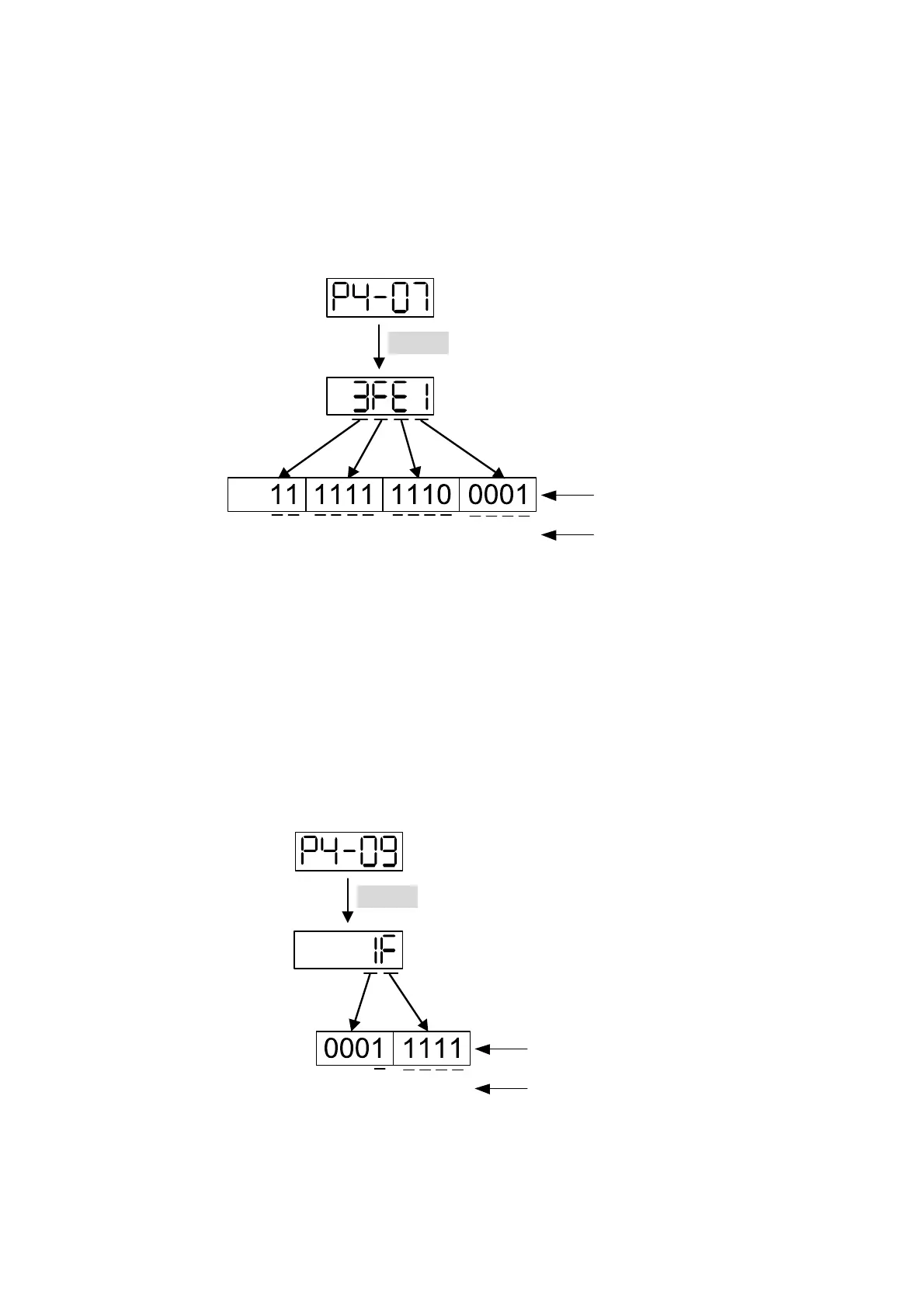
4.4.4 Digital Input Diagnosis Operation
Enter into the Digital Input Diagnosis Mode by the following setting methods. When the
external output signal DI1~DI8 is ON, the corresponding signal will be shown on the
panel. It is displayed by bit. When it shows bit, it means it is ON.
For example, if it shows
3FE1, E is in hexadecimal format, it will be 1100 when it transfers
to binary format. Then, DI6~DI8 is ON.
SET
DI
14
DI
13
DI
12
DI
11
DI
10
DI
9
DI
8
DI
7
DI
6
DI
5
DI
4
DI
3
DI
2
DI
1
Corresponding
DI status
Binary code
The panel displays in
hexadecimal format.
(Display in hexadecimal format)
4.4.5 Digital Output Diagnosis Operation
Enter into the Digital Output Diagnosis Mode by the following setting methods. The
output signal DO1~DO5 is ON and the corresponding signal will be shown on the panel.
It is displayed by bit. When it shows bit, it means it is ON.
For example, if it shows
1F, F is in hexadecimal format, it will be 1111 when it transfers to
binary format. Then, DO1~DO4 is ON.
SET
DO
5
DO
4
DO
3
DO
2
DO
1
Corresponding
DO status
Binary code
The panel displays in
hexadecimal format
(Display in hexadecimal format)
 Loading...
Loading...
