Chapter 6 Control Mode of Operation ASDA-A2R Series
Revision December, 2014
6-35
6.5 Dual Mode
Apart from single mode, dual mode is also provided for operation. According to Section 6.1,
dual modes are as followings:
1
) Speed/position dual mode (PT-S, PR-S, PT-PR)
2
) Speed/torque (force) dual mode (S-T)
3
) Torque (force)/position dual mode (PT-T, PR-T)
4
) Position speed multi mode (PT-PR-S)
5
) Position torque (force) multi mode (PT-PR-T)
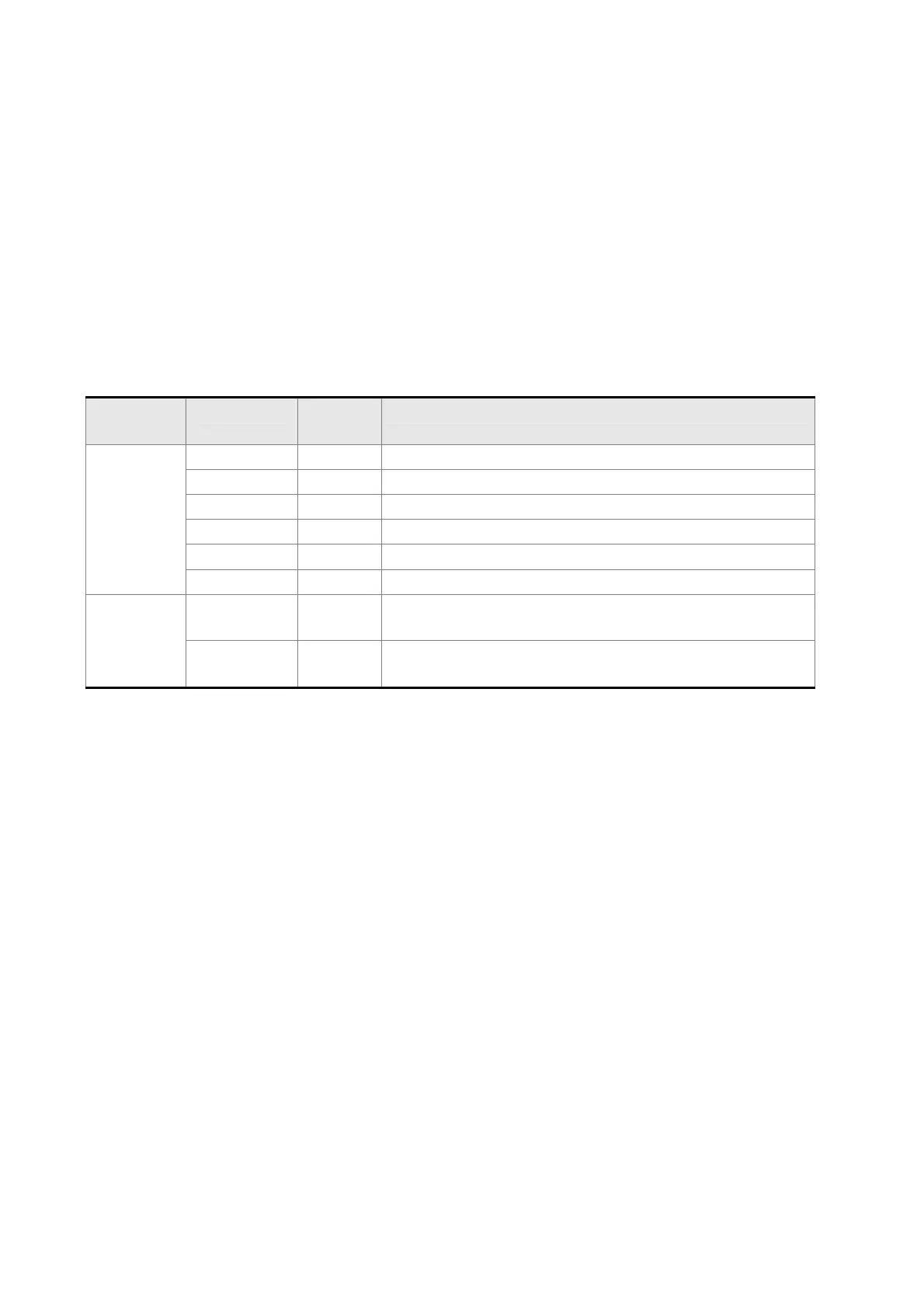
Mode
Name
Short Name Setting
Code
Description
Dual Mode
PT-S 06
PT
and S can be switched via DI signal, S_P.
PT-T 07
PT and T can be switched via DI signal, T_P.
PR-S 08
PR and S can be switched via DI signal, S_P.
PR-T 09
PR and T can be switched via DI signal, T_P.
S-T 0A
S and T can be switched via DI signal, S_T.
PT-PR 0D
PT and PR can be switched via DI signal, PT_PR.
Multi Mode
PT-PR-S 0E
PT , PR and S can be switched via DI signal, S_P
and
PT_PR.
PT-PR-T 0F
PT , PR and T can be switched via DI signal, T_P
and
PT_PR.
Sz and Tz dual mode is not provided here. For avoiding occupying too many digital inputs
in dual mode, speed and torque (force) mode can use external analog voltage as the
command source so as to reduce digital input (SPD0, SPD1 or TCM0, TCM1). Position
mode could use input pulse of PT mode to save the use of DI (POS0, 1, 2, 3, 4, 5). Please
refer to Chapter 3.3.2, table 3.1, Default Value of DI Input Function and table 3.2, Default
Value of DO Output Function for the default DI/DO of each mode.
The relationship between DI/DO signals and PIN define are set after the mode is selected.
If users desire to change the setting, please refer to Chapter 3.3.4.
 Loading...
Loading...
