Chapter 6 Control Mode of Operation ASDA-A2R Series
6-32 Revision December, 2014
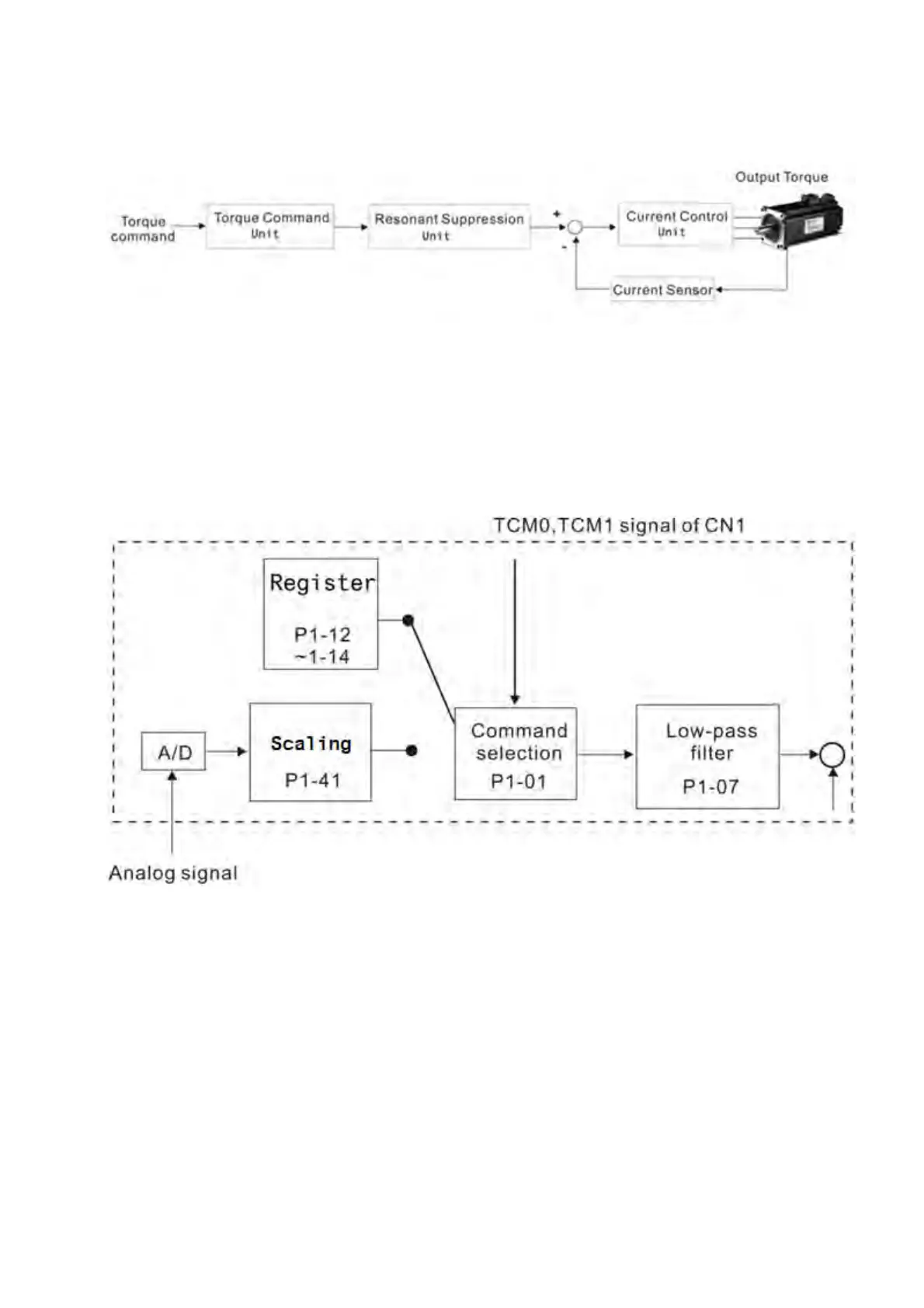
6.4.2 Control Structure of Torque (force) Mode
The basic control structure is as the following diagram:
The torque (force) command unit is to select torque (force) command source according to
Section 6.4.1, including the scaling (P1-41) setting and S-curve setting. The current
control unit manages the gain parameters of the servo drive and calculates the current
for servo motor in time. Since the current control unit is very complicated, and is not
relevant to the application. There is no need to adjust parameters. Only command end
setting is provided.
The structure of torque (force) command unit is as the following diagram.
The upper path is the command from register while the lower one is external analog
command. The command is selected according to the status of TCM0, TCM1 and P1-01
(T or Tz). The torque (force) represented by analog voltage command can be adjusted
via the scaling and can obtain a smoother response via low-pass filter.
 Loading...
Loading...
