AX-Series Motion Controller Instructions Manual Chapter 2
110
Name Timing for Shifting to True Timing for Shifting to False
Valid
When Enable is triggered to True.
When the parameter to read exists.
When Enable turns from True to False.
When Error is rising edge.
Busy
When Enable is triggered to True.
When the parameter to read exists.
When Enable turns from True to False.
When Error is rising edge.
Error
When an error occurs in executing conditions
or input values.
When Execute turns from True to False. (Error
Code is cleared)
ErrorID
Value
When Valid is True and there’re ongoing
updates.
When Valid is False and stops updating.
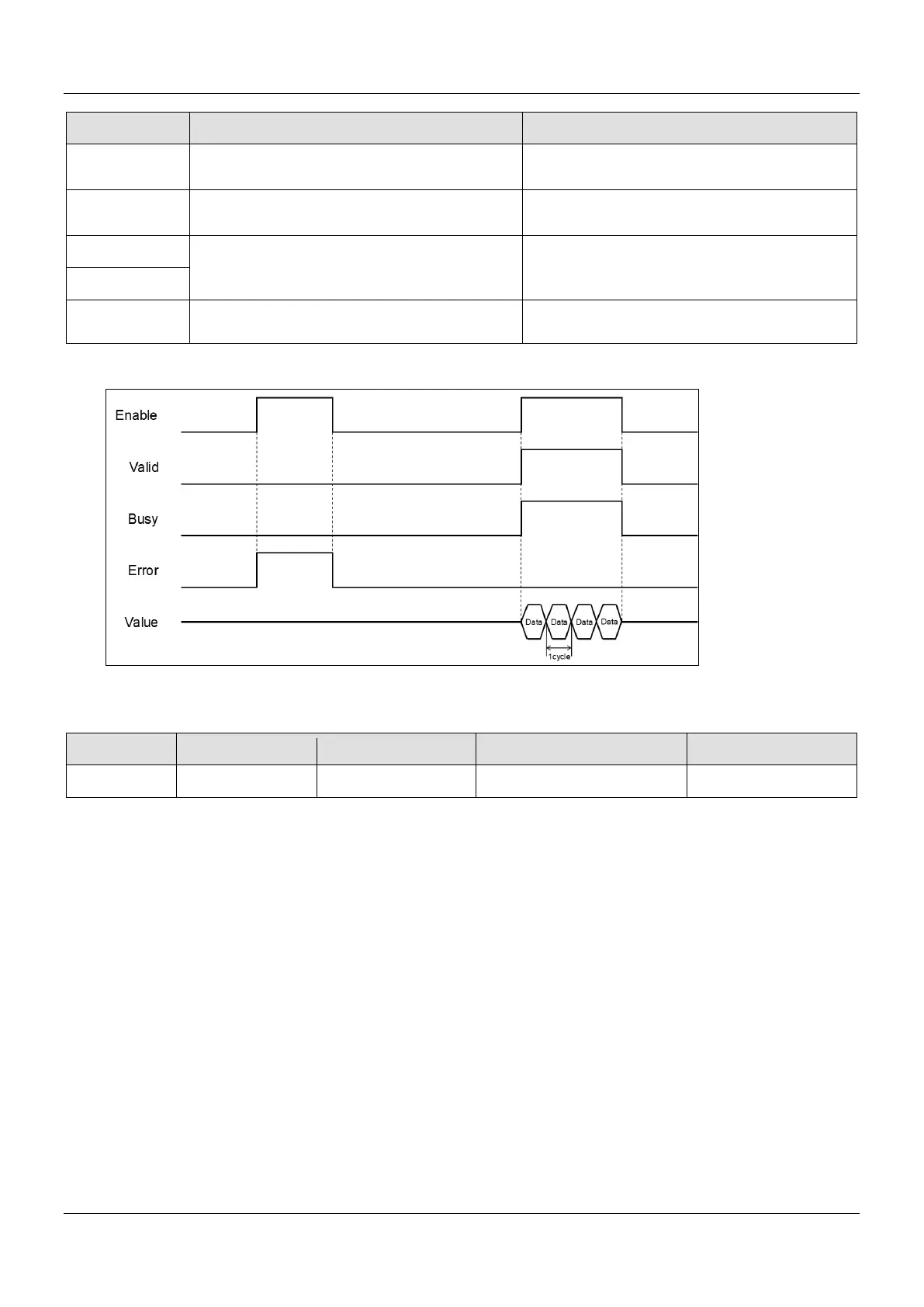
Timing Diagram
*Note: Data = parameter’s value. One cycle = one task period
Inputs/Outputs
Name Function Data Type Setting Value (Default Value) Timing to Take Effect
*Note: AXIS_REF_SM3(FB): Every function block contains this variable, which works as the starting program for function blocks.
Function
How to use MC_ReadParameter to read the parameter values of the desired object with its parameter number in
EtherCAT Object Dictionary:
Use SHL instruction to move the data length of the desired object to the left for 24 bits.
Use SHL instruction to move the index of the desired object to the left for 8 bits.
The input ParameterNumber must contain the data length of the index and the subindex. Refer to the following
formula:
ParameterNumber: = - DWORD_TO_DINT(SHL(TO_DWORD(data length of object dictionary), 24) +
SHL(TO_DWORD(index of object dictionary), 8) + object sub-index);
To read axis parameters, you’ll need to enter the parameter number of AXIS_REF_SM3(FB) into the ParameterNumber
input.
Troubleshooting
If an error occurs during the execution of the instruction, Error will change to True. You can refer to ErrorID (Error