AX-Series Motion Controller Instructions Manual Appendix A
531
A.3 Error Codes and Troubleshooting
A.3.1 For Synchronous Axes
When an error occurs, you can troubleshoot errors through error codes and the corresponding indicators. refer to AX-3
Operational Manual for more details of troubleshooting process.
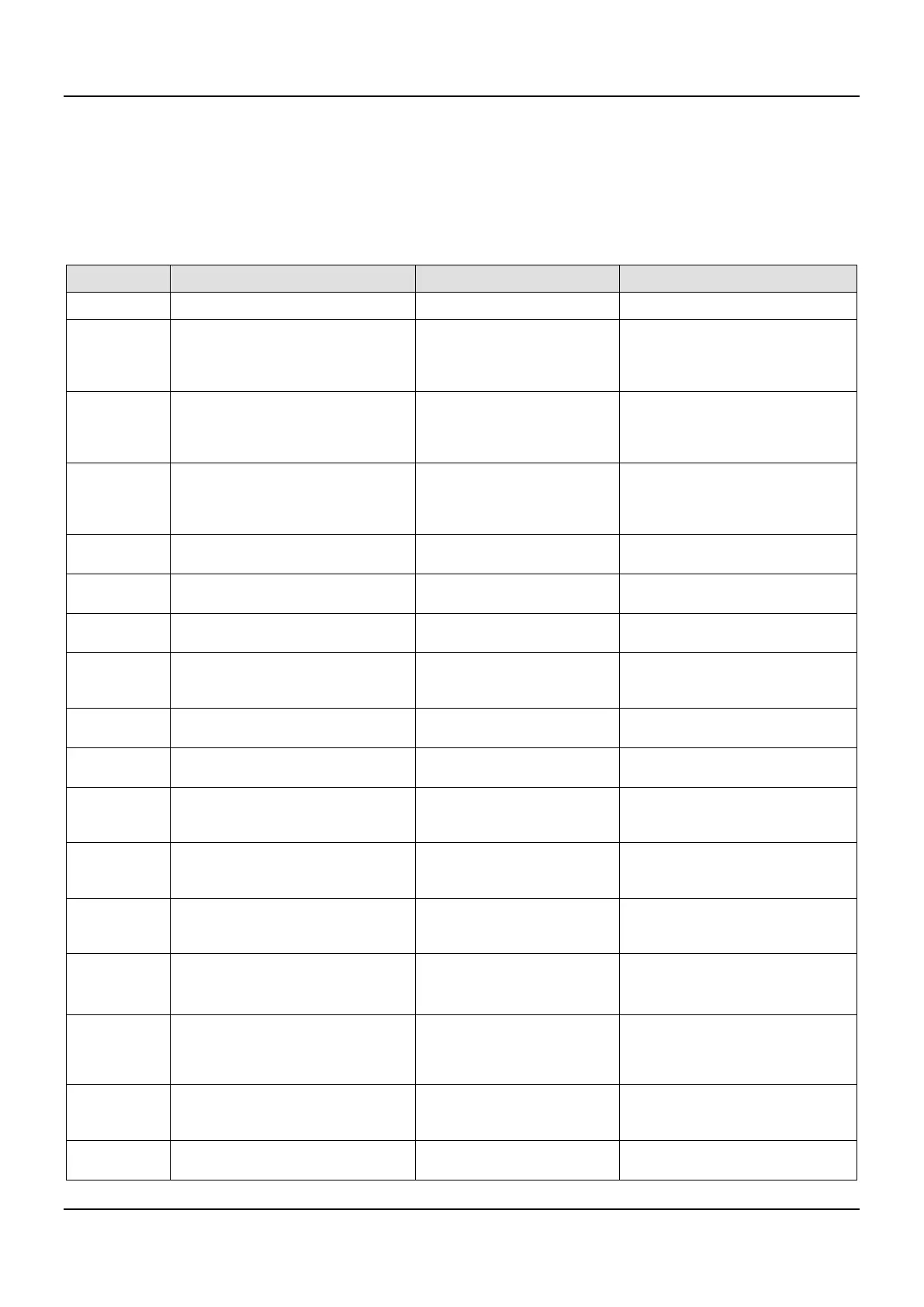
The following table lists the error codes and the contents of the errors:
Error code Description Contents Corrective Action
0x00000 SMC_NO_ERROR No error messages.
0x00001
SMC_DI_GENERAL_
COMMUNICATION_
ERROR
Communication error.
Make sure the servo’s network cable
is properly plugged, then reset
EtherCAT master and execute
MC_Reset.
0x00002 SMC_DI_AXIS_ERROR Axis error.
Check the error information and
troubleshoot the error according to
each servo’s user manual, then
execute MC_Reset.
0x00003
SMC_DI_FIELDBUS_
LOST_SYNCRONICITY
Loss of synchronicity.
Execute SMC3_ReinitDrive. If the
error occurs frequently, refer to
Task max cycle time and increase
EtherCAT DC time.
0x0000A
SMC_DI_SWLIMITS_
Software limit errors.
Execute MC_Reset and run
reversely away from the limit.
0x0000B
SMC_DI_HWLIMITS_
Hardware limit errors. Execute MC_Reset.
0x0000C
SMC_DI_LINEAR_AXIS_
OUTOFRANGE
Incremental position of a linear
axis is out of range.
Execute MC_Reset
0x0000D
SMC_DI_HALT_OR_
QUICKSTOP_NOT_
SUPPORTED
Not support Halt or Quickstop
state of drivers.
Execute MC_Reset
0x00010
SMC_DI_
Excessive position error. Execute MC_Reset
0x00011
SMC_DI_HOMING_
Homing error occurs. Execute MC_Reset
0x00014
SMC_REGULATOR_OR_
START_NOT_SET
The motion FB cannot be run
under the current axis state.
Enable the servo and execute
MC_Reset, then re-execute the
0x00015
SMC_W RONG_
CONTROLLER_MODE
The axis is under wrong
controller mode.
Execute SMC_SetControllerMode to
switch the axis to the proper
0x00019
SMC_INVALID_ACTION_
FOR_LOGICAL
Invalid action for logical axes.
Do not perform improper operation to
logical axes, such as powering on
logical axes.
0x0001E
SMC_FB_WASNT_
CALLED_DURING_
MOTION
Function blocks cannot be
called in movement state.
execute FBs in bus cycle task.
0x0001F SMC_AXIS_IS_NO_AXIS_REF AXIS_REF variable type errors.
The pointer must points to the
register.
0x00020
SMC_AXIS_REF_
CHANGED_DURING_
AXIS_REF variables have been
changed while the modules
Execute MC_Reset and do not
change the axis input of the function
0x00021
SMC_FB_ACTIVE_AXIS_
Execute servo off while axis is
Power on the servo and execute
 Loading...
Loading...

