AX-Series Motion Controller Instructions Manual Appendix A
532
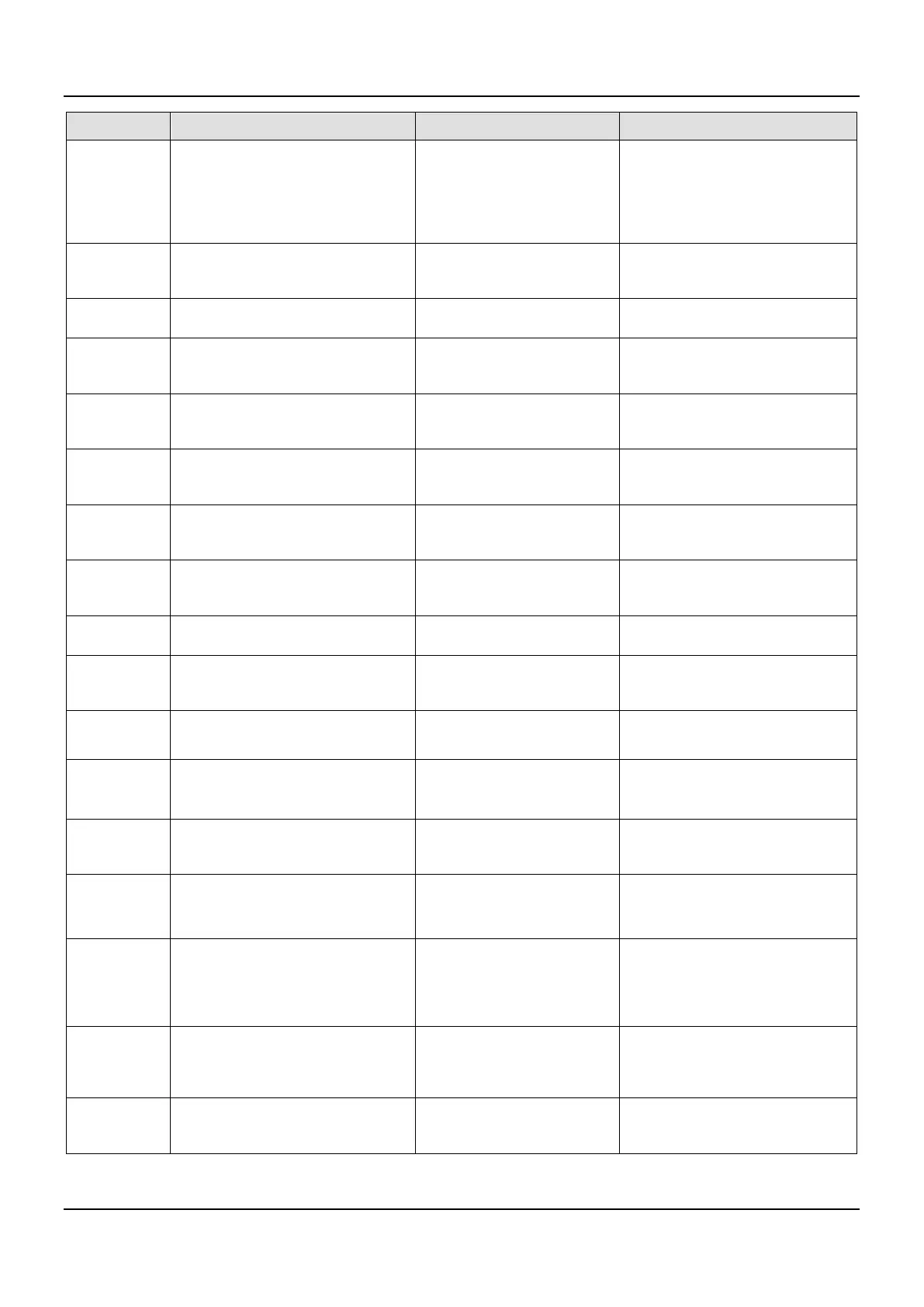
Error code Description Contents Corrective Action
0x00022
SMC_AXIS_NOT_READY_FOR_MO
TION
The motion instruction cannot
be run under the current axis
state.
As a result that the axis is not able to
be controlled, check if the state is
power ON or an error exists, then
enables the axis or execute
MC_Reset depending on the
0x00023
SMC_AXIS_ERROR_
DURING_MOTION
Error occurs during motion.
refer to the servo user manual to
check on the error information, then
execute MC_Reset.
0x00028
SMC_VD_MAX_
Exceeds the maximum velocity
Troubleshoots with MC_Reset.
0x00029
SMC_VD_MAX_
ACCELERATION_
Exceeds the maximum
acceleration limit
Troubleshoots with MC_Reset.
0x0002A
SMC_VD_MAX_
DECELERATION_
EXCEEDED
Exceeds the maximum
deceleration limit
fMaxDeceleration.
Troubleshoots with MC_Reset.
0x00032
SMC_3SH_INVALID_
VELACC_VALUES
Invalid Setting Values of
velocity or acceleration.
insert the value of velocity or
acceleration again and then re-run
the function block.
0x00033
SMC_3SH_MODE_
NEEDS_HWLIMIT
The current mode needs the
hardware limit to be activated.
bIgnoreHWLimit should not be True
in the current mode. select the
0x00046
SMC_SCM_NOT_
SUPPORTED
The mode is not supported.
Device does not support this mode,
re-select the proper mode then
activate the function block.
0x00047
SMC_SCM_AXIS_IN_
The controller mode cannot be
changed in the current state.
Use MC_Reset to troubleshoot the
0x00048
SMC_SCM_
INTERRUPTED
SMC_SetControllerMode is
interrupted by MC_Stop or
reactivate the function block.
0x0004B
SMC_ST_WRONG_
CONTROLLER_MODE
The axis is under the wrong
controller mode.
Use MC_Reset to troubleshoot the
error.
0x00050
SMC_RAG_ERROR_
DURING_STARTUP
Error occurs when the axis
group is activated.
Make sure the configuration is
normal and re-execute
SMC3_ReinitDrive.
0x00051
SMC_RAG_ERROR_AXIS_NOT_INI
TIALIZED
The axis is not in the required
state.
SMC3_ReinitDrive cannot be run
when EtherCAT Master is in Initial
state.
0x00055 SMC_PP_WRONG_AXIS_TYPE
Virtual axes or logical axes are
not supported by the function
block
SMC3_PersistPosition cannot be
used on the virtual axis.
0x00056
SMC_PP_NUMBER_OF_
ABSOLUTE_BITS_
INVALID
Invalid absolute bits, which
must be within 8~32 bits.
The value input to
usiNumberOfAbsoluteBits of
SMC3_PersistPositionSingleturn is
incorrect, re-enter the value.
0x0005A
SMC_CGR_ZERO_
VALUES
Invalid value.
Change the values of
dwRatioTechUnitsDenomand to non-
zero values and then re-run the
function block.
0x0005B
SMC_CGR_DRIVE_
POWERED
The gear ratio parameters of
the drive cannot be modified
when it is under controlled.
Make the axis enter Disable state,
then re-run the function block.
 Loading...
Loading...

