AX-Series Motion Controller Instructions Manual Chapter 2
59
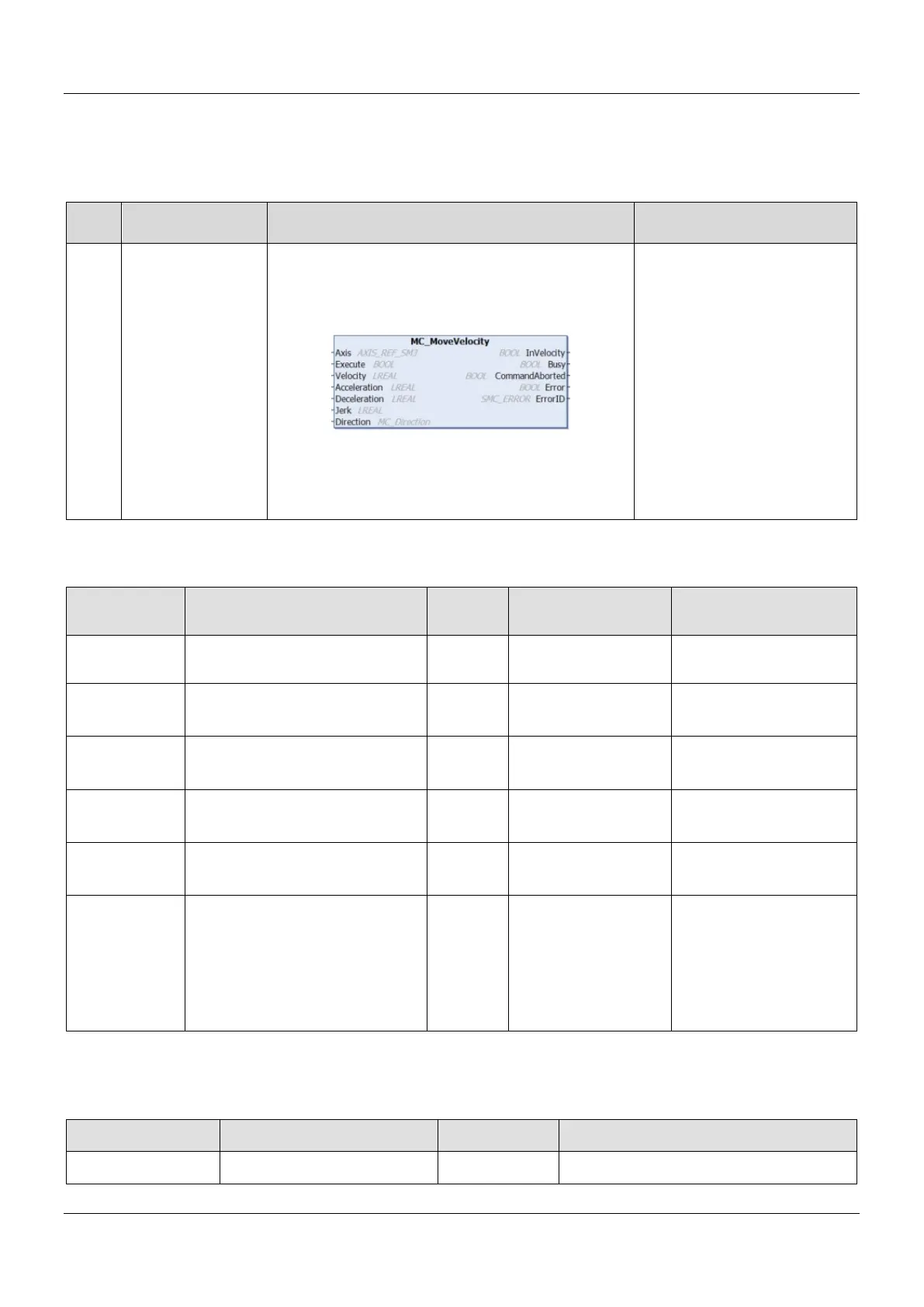
2.1.10 MC_MoveVelocity
Supported Devices: AX-308E, AX-8, AX-364E
FB/FC Instruction Graphic Expression ST Language
FB MC_MoveVelocity
MC_MoveVelocity_instance (
Axis : =,
Execute : =,
Velocity : =,
Acceleration : =,
Deceleration : =,
Jerk : =,
Direction : =,
InVelocity =>,
Busy =>,
CommandAborted =>,
Error =>,
ErrorID => );
Inputs
Name Function
Data
Setting Value (Default
Timing to Take Effect
Execute
The instruction is run when Execute
changes from False to True.
BOOL True/False (False) -
Velocity
Target velocity.
LREAL Positive or 0(0)
When Execute turns to
True and Busy is False.
Acceleration
Acceleration rate.
2
LREAL Positive(0)
When Execute turns to
True and Busy is False.
Deceleration
Deceleration rate.
2
LREAL Positive(0)
When Execute turns to
True and Busy is False.
Jerk
Jerk value.
3
LREAL Positive(0)
When Execute turns to
True and Busy is False.
Direction
Specifies the direction for
servo motor rotation.
MC_
Direction*
3: fastest
2: current
1: positive
0: shortest
-1: negative
(current)
When Execute turns to
True and Busy is False.
*Note: MC_Direction: Enumeration (Enum)
Outputs
Name Function Data Type Output Range (Default Value)
When the specified target
 Loading...
Loading...

