AX-Series Motion Controller Instructions Manual Chapter 2
68
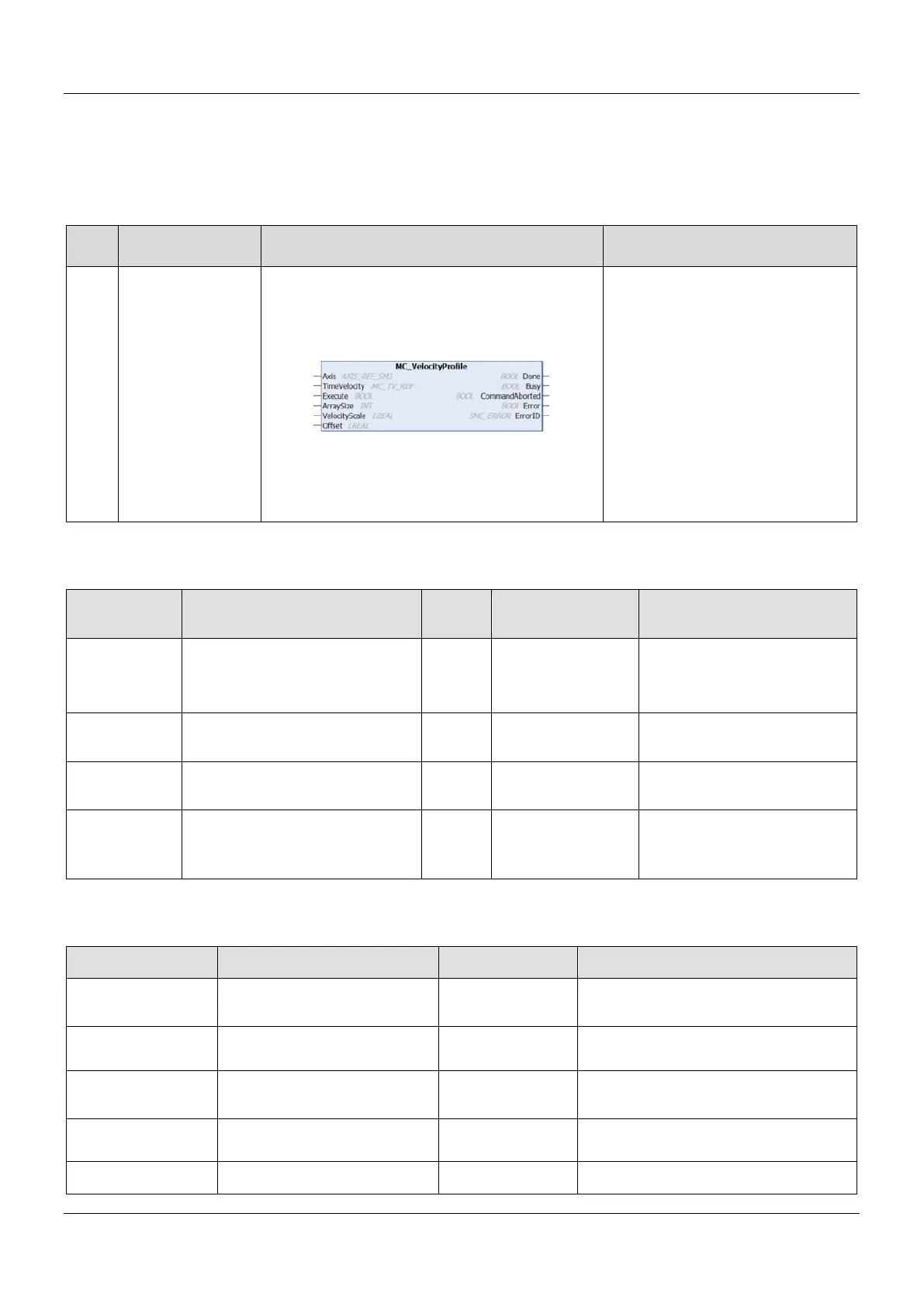
2.1.12 MC_VelocityProfile
Supported Devices: AX-308E, AX-8, AX-364E
MC_VelocityProfile is used to set time and velocity to plan motion profiles.
FB/FC Instruction Graphic Expression ST Language
FB MC_VelocityProfile
MC_VelocityProfile_instance(
Axis: =,
TimeVelocity: =,
Execute : =,
ArraySize: =,
VelocityScale: =,
Compensation: =,
Done =>,
Busy =>,
CommandAborted =>,
Error =>,
Inputs
Name Function
Data
Setting Value
Timing to Take Effect
Execute
The instruction is run when Execute
changes from False to True.
BOOL True/False (False) -
ArraySize Number of motion profile arrays INT Positive or 0(0)
When Execute turns to True and
VelocityScale Overall scale factor in value. LREAL
Negative, positive or
When Execute turns to True and
Compensation
Overall profile Compensation in
value
(Unit: user unit/s)
LREAL
Negative, positive or
0(0)
When Execute turns to True and
Busy is False.
Outputs
Output Range (Default Value)
Done
True when execution of path
BOOL True/False (False)
Busy True when the instruction is run. BOOL True/False (False)
CommandAborted
True when the instruction is
BOOL True/False (False)
Error True when an error occurs. BOOL True/False (False)
ErrorID
Record the error code when an
SMC_ERROR* SMC_ERROR (SMC_NO_ERROR)
 Loading...
Loading...

