AX-Series Motion Controller Instructions Manual Chapter 2
128
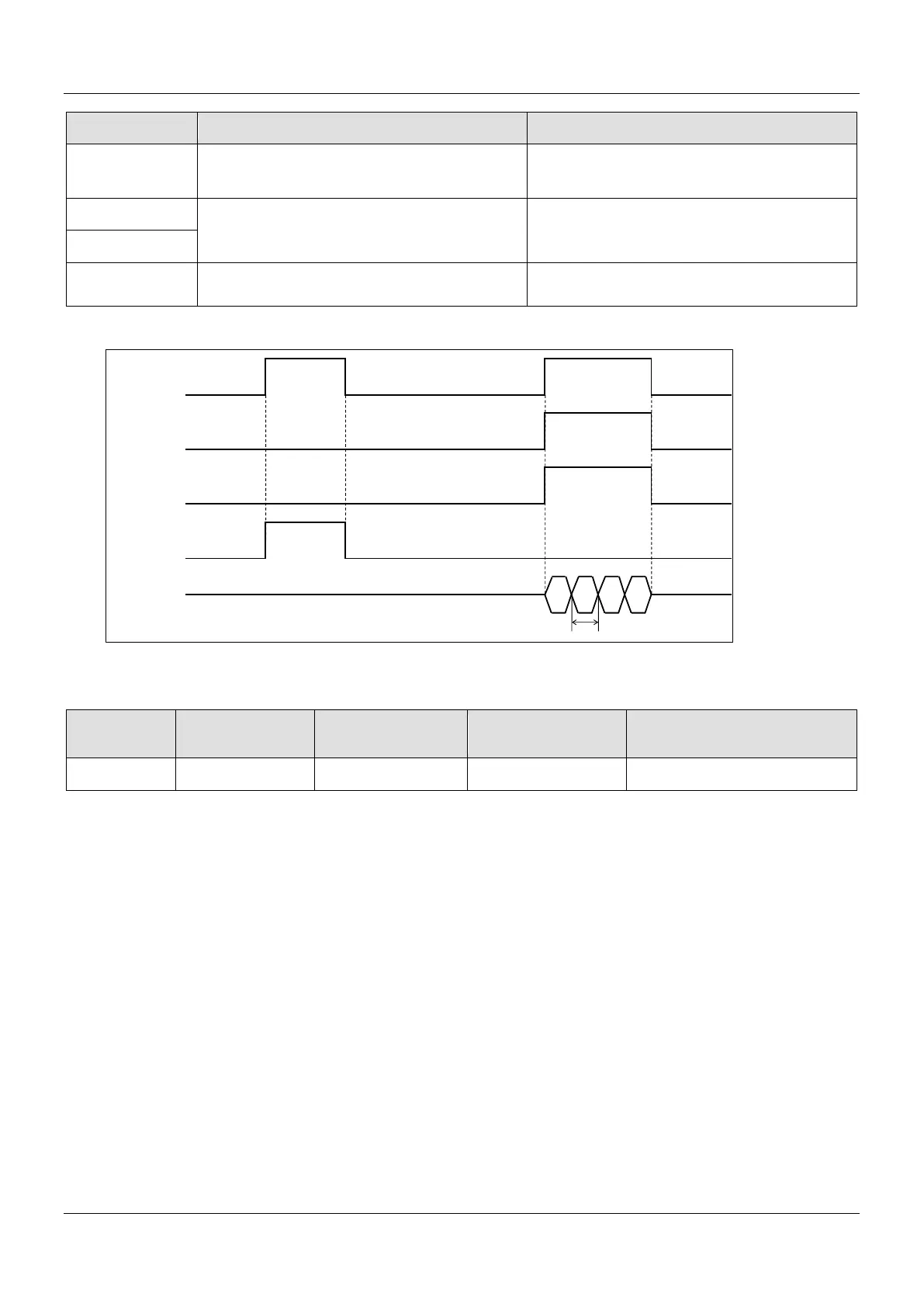
Name Timing for Shifting to True Timing for Shifting to False
Busy
When Enable is triggered to True.
When the parameter to read exists.
When Enable turns from True to False.
When Error is rising edge.
Error
When an error occurs in executing conditions
or input values.
When Execute turns from True to False. (Error
Code is cleared)
ErrorID
Torque
When Valid is True and there’re ongoing
updates.
When Valid is False and stop updating.
Timing Diagram
Inputs/Outputs
Name Function Data Type
Setting Value (Default
Value)
Timing to Take Effect
Axis Specify the axis. AXIS_REF_SM3* AXIS_REF_SM3 When Enable turns to True.
*Note: AXIS_REF_SM3(FB): Every function block contains this variable, which works as the starting program for function
blocks.
Function
The torque value read by MC_ReadActualTorque is the value of fActTorque in AXIS_REF_SM3.
While using MC_ReadActualTorque, OD 0x6077 (Torque actual value) must be mapping to TxPDO so as to read the
actual torque of the servo.
Troubleshooting
If an error occurs during the execution of the instruction, Error will change to True. You can refer to ErrorID (Error
Code) to address the problem.
2.2.10 MC_Reset
Supported Devices: AX-308E, AX-8, AX-364E
MC_Reset clears axis-related errors so that the error memory is available for new error messages.
 Loading...
Loading...

