AX-Series Motion Controller Instructions Manual Appendix A
516
Appendix A
A.1 Instruction Tables and Indexes
A.1.1 By Function
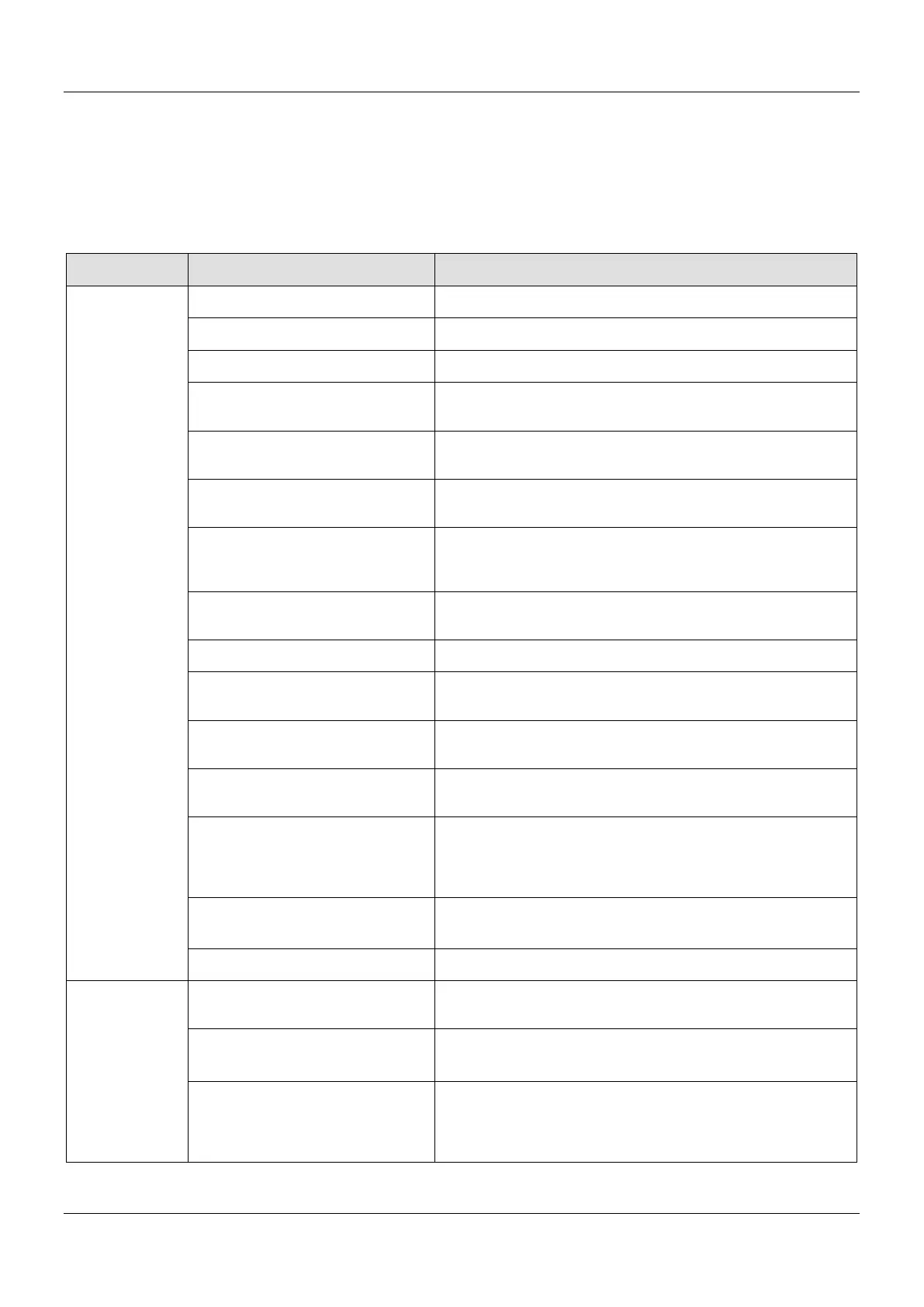
Single-axis Motion Control Instruction (Synchronous axes)
Positioning
control
MC_Home controls the axis to perform the homing operation.
MC_Stop decelerates an axis to a stop.
MC_Halt MC_Halt stops the axis movement in a controlled way.
MC_MoveAbsolute
MC_MoveAbsolute controls the axis to move to the specified
absolute target position at a specified behavior.
MC_MoveRelative
MC_MoveRelative controls the axis to move a specified relative
distance with a specified behavior.
MC_MoveAdditive
MC_MoveAdditive controls the axis to move an additional
distance at a given speed and acceleration.
MC_MoveSuperimposed
MC_MoveSuperimposed controls the axis to move a relative
superimposed distance at a specified behavior while the axis is
moving.
MC_PositionProfile
MC_PositionProfile is used to set time and position to plan motion
profiles.
MC_Jog MC_Jog enables an axis to be moved forward or backward.
DMC_Home_P
DMC_Home_P, an application function block of pulse output,
drives the pulse axis to perform the homing in the set mode.
DMC_ImmediateStop_P
DMC_ImmediateStop_P can stop the PO axis motion immediately
and stop the pulse output.
DMC_MoveVelocityStopByPos
DMC_MoveVelocityStopByPos controls an axis to stop at a
specified position after a period of motion.
DMC_MoveFeed
DMC_MoveFeed can specify an external interrupt input. During
the movement of the target, the position where the interrupt
occurs is used as the starting point to perform the positioning
movement.
DMC_MoveModulo
DMC_MoveModulo is used for modulo positioning and specifies the
number of rotation turns.
DMC_Home_E controls and plans homing.
Velocity control
MC_MoveVelocity
MC_MoveVelocity performs velocity control on an axis in the
position mode with a specified behavior and an average velocity.
MC_VelocityProfile
MC_VelocityProfile is used to set time and velocity to plan motion
profiles.
MC_AccelerationProfile
Similar to MC_PositionProfile, MC_AccelerationProfile is used to
set time and acceleration to plan motion profiles. However, its
position points are defined by acceleration variables in
 Loading...
Loading...

