AX-Series Motion Controller Instructions Manual Appendix A
549
A.3.2 For Positioning Axis
When an error occurs, you can troubleshoot errors through error codes and the corresponding indicators. Refer to AX-3
Operational Manual for more details of troubleshooting.
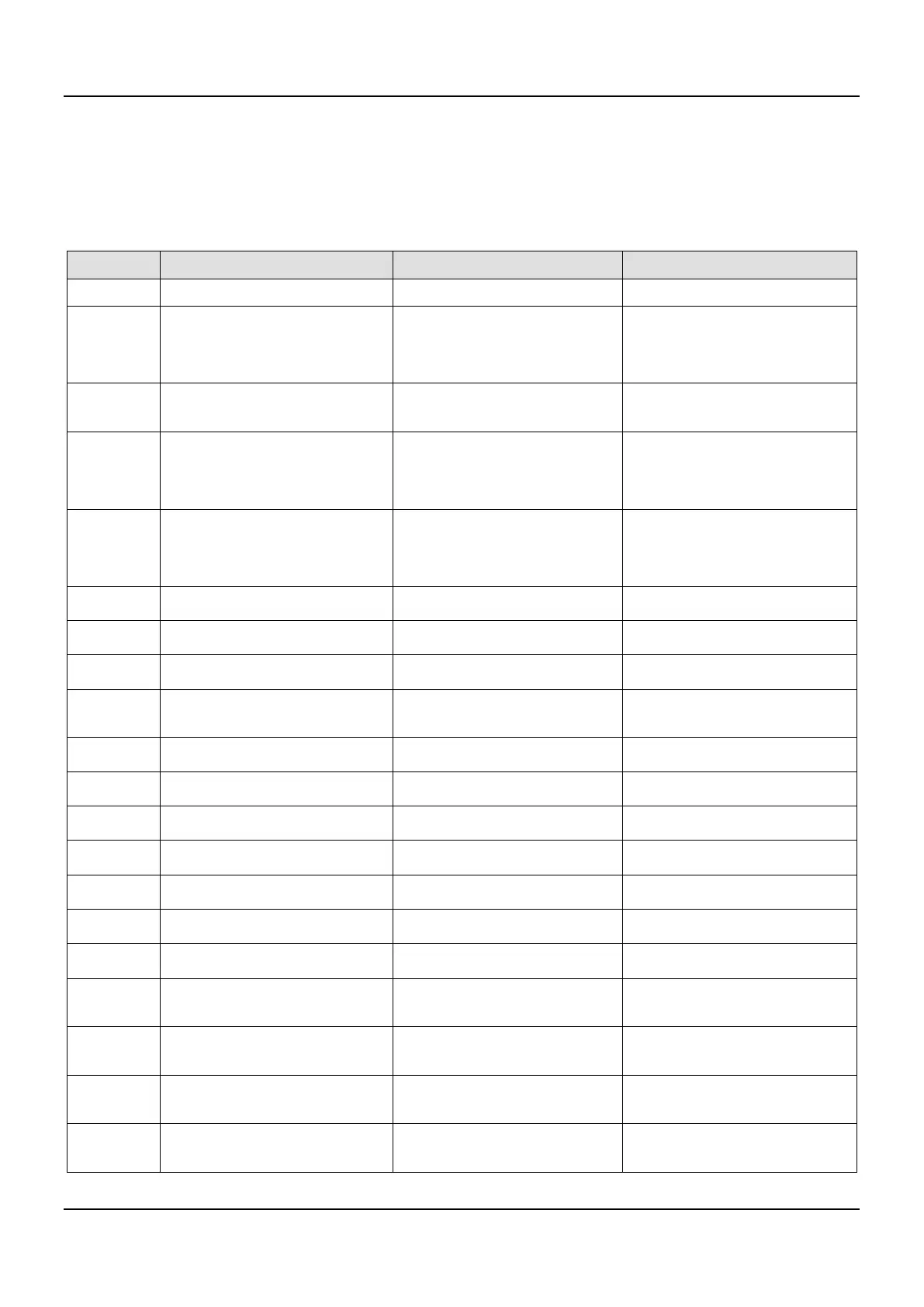
The following table lists the error codes and the contents of the errors:
Error code Description Contents Corrective Action
0x00000 SML_NO_ERROR No error messages -
0x00001 SML_DI_GENERAL_COMMUNICATION
_ERROR
Communication error Confirm if the Slave network cable is
properly plugged. Run
DFB_ResetECATMaster to reset
EtherCAT Master, and then re-run
0x00002 SML_DI_AXIS_ERROR Axis error Confirm Slave error information and
eliminate the error, and then re-execute
0x00015 SML_WRONG_OPMODE Wrong control mode Function block does not support
execution in the current mode. To
execute this function block, execute
SMC_SetControllerMode first to switch
the axis to the appropriate mode.
0x00022 SML_AXIS_NOT_READY_FOR_MOTIO
N
The Slave state cannot execute the
motion control instruction.
Axis is at the state that cannot be
controlled. Confirm whether it is at the
Power-on or error state. Start the axis or
run MC_Reset_DML depending on the
0x00023 SML_MA_MR_MODULO_ACT_POS_N
PDO lacks the essential parameter.
Configure Actual Position (16#6064) to
0x00024 SML_MV_INVALID_VELACCDEC_VAL
Invalid velocity or
acceleration/deceleration Setting Value
Use MC_Reset_DML to eliminate error.
0x00050 SMC_RAG_ERROR_DURING_STARTU
Error occurs during axis re-startup
Confirm if the bus configuration is normal,
and re-run MC_ReinitDrive_DML.
0x0005A SML_CGR_ZERO_VALUES Cannot enter 0 f or
dwRatioTechUnitsDenom and
After modifying dwRatioTechUnitsDenom
and iRatioTechUnitsNum to non-zero
values, re-run the function block.
0x0005B SML_CGR_AXIS_POWERED Cannot change gear ratio parameter at
After making the axis state goes into
Disable, re-run the function block.
0x0005D SML_CGR_MODULOPERIOD_NOT_IN
Module period is not an integer. After modifying the fModuloPeriodU
parameter, re-run the function block.
0x0005E SML_CGR_MOVEMENTTYPE_INVALID
Wrong axis type (Must be either a linear
After modifying the iMovementType
parameter, re-run the function block.
0x0005F SML_CGR_MODULOPERIOD_NON_P
Module period cannot be a negative. After modifying the fPositionPeriod
parameter, re-run the function block.
0x00060 SML_CGR_MODULOPERIOD_TOO_S
Module period is too small. After modifying the fPositionPeriod
parameter, re-run the function block.
0x00061 SML_CGR_MODULOPERIOD_TOO_LA
Module period is too large. After modifying the fPositionPeriod
parameter, re-run the function block.
0x00078 SML_R_NO_ERROR_TO_RESET No axis error after using
Confirm whether the axis is correct, and
then re-run the function block.
0x0007A SML_R_ERROR_NOT_RESETTABLE Error, non-resettable. Confirm whether the Slave error has
been eliminated. After error disappeared,
0x00083 SML_RP_REQUESTING_ERROR Slave has no corresponding OD, or
reading the OD is not allowed.
The OD you visit does not exist or is not
allowed to be accessed. Confirm the
input OD is correct and can be read.
0x00084 SML_RP_RCV_PARAM_CONVERSION
_ERROR
Conversion error of the axis parameter
to servo OD. Unknown SoftMotionLight
The parameter you visit does not exist.
0x0008D SML_WP_SENDING_ERROR Slave has no corresponding OD, or
writing the OD is not allowed.
The OD you visit does not exist or is not
allowed to be written. Confirm the input
OD is correct and can be written.
 Loading...
Loading...

