AX-Series Motion Controller Instructions Manual Chapter 2
126
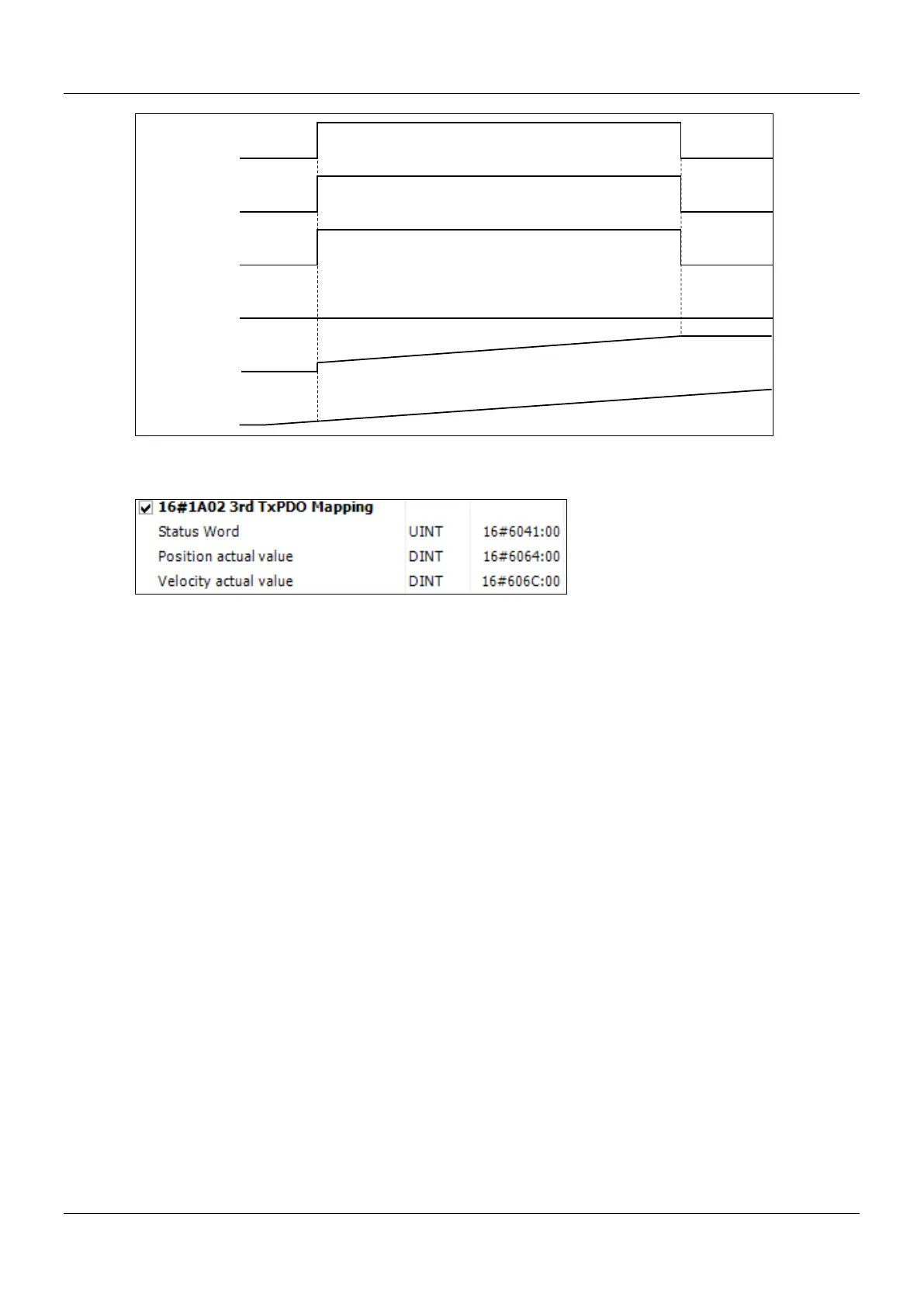
While using MC_ReadActualVelocity, OD 0x606C (Actual velocity) must be mapping to TxPDO so as to read the
actual velocity of the servo.
If 0x606C is not mapping to TxPDO, the actual velocity of the servo will be calculated based on OD 0x6064(Actual
position).
Troubleshooting
If an error occurs during the execution of the instruction, Error will change to True. You can refer to ErrorID (Error Code)
to address the problem.
 Loading...
Loading...

